| TRACKS |
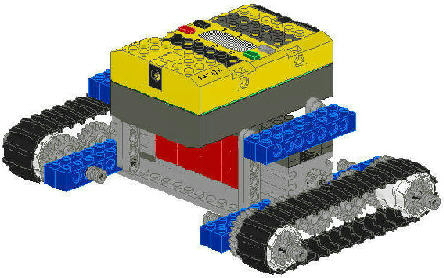
| -----SNOW-ROVER----- --Powered By--RCX --Controlled By--Infared remote --Piece Count--471 --Motor Count--5 --Status--Dissassembled --Notes--A superfast robot originally made for snow. Driven by four motors and steered by a single center mounted motor. The Drive system has two tracks in front and two in back. The steering system was one motor that jack-knifed the entire robot and caused it to turn left of right. This steering system allowed it to turn without loosing any of it speed. The SNOW ROVER could go over various terrain and it could recover from a roll and continue driving. |
 |
 |
| -----TRACKBOT-1.0----- --Powered By--Scout --Controlled By--Infared remote --Piece Count--Unknown --Motor Count--2 --Status--Dissassembled --Notes--A very simple trackbot. Does not use any sensors. Very slow moving. Slightly high center of gravity. |
| -----TRACKBOT-2.0----- --Powered By--RCX --Controlled By--Infared remote or RCXcc program --Piece Count--Unknown --Motor Count--2 --Status--Dissassembled --Notes--Very good bumper. Slightly faster than 1.0. Slightly lower than 1.0. Also much stronger that 1.0. |
 |
| Click on anything below that you want to see and you will be brought to its page!!! -Manipulators- Mobile Manipulator 2-Joint Manipulator 5-Fingered Manipulator Battleclaws -Boats- Boat-1 Boat-2 Half-Sub-Aquabot Turbo-Tri-Prop -Ambulators- 6-Legged Ambulator 8-Legged Ambulator Bipedal Ambulator Monoped-Stompbot -Wheels- Rollbot Razortooth -Tracks- Snow Rover Trackbot 1.0 Trackbot 2.0 -Other- Super Claw Controller Etchabot -Prototypes- Prototype Car Prototype Biped Prototype Manipulator Prototype Controller Prototype Photobot Prototype Scanner Prototype Wrist |