| Manipulators (grabbers) |
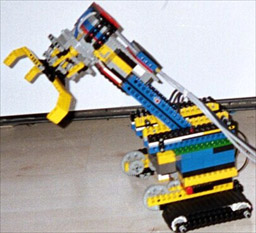
| -----MOBILE-MANIPULATOR----- --Powered By--RCX, Air --Controlled By--2 pneumatic valves, 2 touch sensors, 1 light sensor --Piece Count--Over 800 --Motor Count--3 --Status--Dissassembled --Notes--Slow moving track vehical. Can drive around, pick up objects, drive them to another area, and drop them off. The virtical motion of the arm had a motion range of over 85 degrees. The wrist could spin a continual 360 degrees. The grabbing motion of the claw has a range of motion of over 110 degrees. The drive system was extreamly geared down (especially for tracks) and this allowed it to carry just about anything that it could grab on to. |
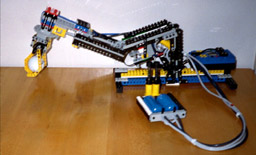
| -----2-JOINT-MANIPULATOR----- --Powered by--RCX, Air --Controlled by--2 pneumatic valves, 2 touch sensors, 1 light sensor --Piece Count--Over 750 --Motor Count--2 --Status--Dissassembled --Notes--This manipulator can pick up objects, spin itself around using the wrist, and even (to a limited extent) throw a ball. The claw part can open and close in a range of 110 degrees. The shoulder joint could move through a range of about 75 degrees. The elbow joint moved over a range of 145 degrees. This manipulator could lower the shoulder joint and the elbow joint and spin the wrist around causing the whole base of the robot to move without wheels. |
 |
| -----5-FINGERED-MANIPULATOR----- --Powered By--Air --Controlled By--5 pneumatic valves --Piece Count--Unknown --Motor Count--0 --Status--Dissassembled --Notes--This pneumatic device had five fingers. Each finger had its own piston controlled by a pneumatic valve. The hand could make several hand signs as well a pick up objects. Each finger had four rubber bands for grip. |
 |
 |
 |
| -----BATTLECLAWS----- --Powered By--RCX, Air, Large 9-Volt Battery Box --Controlled By--4 pneumatic valves and 2 touch sensors --Piece Count--482 --Motor Count--2 --Status--Dissassembled --Notes--A battle game made up of two manipulators that fight to the death. Each claw can spin 360 degrees at the wrist and lunge forward to attack. They were each controlled by a different person. The person to completely destroy the oposing claw wins. |
 |
| Click on anything below that you want to see and you will be brought to its page!!! -Manipulators- Mobile Manipulator 2-Joint Manipulator 5-Fingered Manipulator Battleclaws Battleclaws 2.0 -Boats- Boat-1 Boat-2 Half-Sub-Aquabot Turbo-Tri-Prop -Ambulators- 6-Legged Ambulator 8-Legged Ambulator Bipedal Ambulator Monoped-Stompbot -Wheels- Rollbot Razortooth -Tracks- Snow Rover Trackbot 1.0 Trackbot 2.0 -Other- Super Claw Controller Etchabot -Prototypes- Prototype Car Prototype Biped Prototype Manipulator Prototype Controller Prototype Photobot Prototype Scanner Prototype Wrist |
 |
| -----BATTLECLAWS 2.0----- --Powered By--RCX, Air, Large 9-Volt Battery Box --Controlled By--6 pneumatic valves and 4 contact sensors --Piece Count--412 --Motor Count--2 --Status--Assembled --Notes--A highly improved revision of my original Battleclaws. This version has wrists that can spin 360 degrees, claws that can open/close with 80 degrees of freedom, and arms that move foreward/backward with 60 degrees of freedom and left/right with 120 degrees of freedom. This new version is built with four axises to allow more manuverability. It is also built to be stronger, faster, and more efficient. |