| Super Twin21 Baja |
| Continual development still on the Big Twin, as we head into month 26 of the project. The planned upgrades for the second iteration of the big buggy include the Twin .32 engines, lowered front shock towers, revised shock geometry and all-new shocks amongst a few other things. The time came to make the front suspension changes. I was very happy with the way it worked before, just not with the vulnerability of the high shocks and the out-of-scale look. What is needed is to find a way of getting the same (or better) performance without the downsides of the old design. You could do it by trial and error, but there's a lot of stuff to change: Shock length Shock angle (range adjustable) Shock travel to length ratio Oil volume When you have to make all the parts, trial and error really isn't great. If the performance is not as expected, you are faced with making a lot of parts again to a slightly different design, and that takes a lot of time. Time you could be working on improving the rest of the vehicle, or maybe even driving it! (There's always that chance). What I decided to do is simulate the setup as it is currently, then change some parameters in the model to what I want (i.e. incorporate the design changes for the buggy) and re-simulate the system to see the performance change. I want the simulation to be accurate, just because it is something I enjoy doing, but it is not necessary to go completely to town unless major performance changes are desired. Seeing as I want to minimise performance difference, a totally accurate model is not entirely necessary because we are looking at a small difference (minimised) in performance. However, this model takes every controlling parameter into account (as far as springing is concerned), so it should be possible to predict what extreme changes in suspension design have on the way the system works. |
| Designing the new Twin 32 buggy |
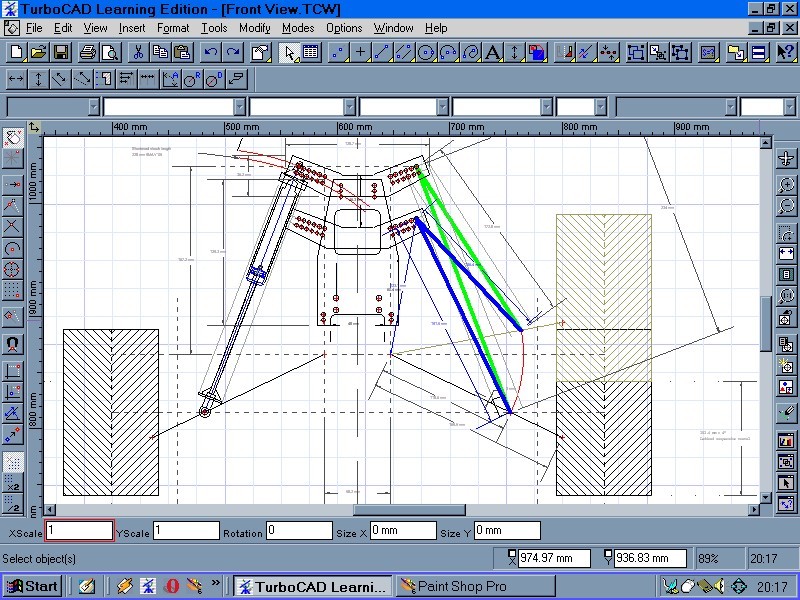 |
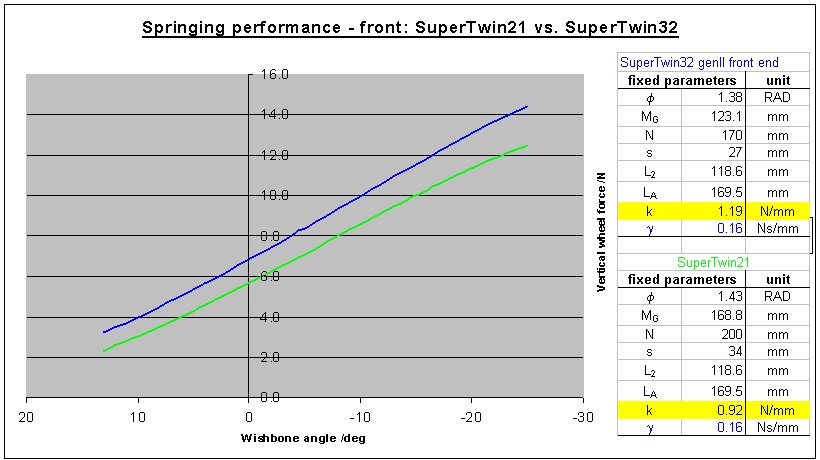
| ORIGINAL FRONT SHOCK MOUNTING LOCATION PROPOSED MOUNTING LOCATION Shown here are the shocks in the extremes of travel, from fully extended to bottomed out. Actually the original shocks had more travel than needed, so that the car would physically bottom out before the shock was damaged. The design wheel travel is 4". Anything more and the driveshafts get uncomfortable :) So as you can see from the chart, the proposed configuration yields slightly more wheel force at all positions along the travel. It is also slightly more rising-rate, as in the difference between the two gets bigger as the shocks compress. I won't explain the meaning of all the parameters, but k is the spring constant (stiffness) and N is the natural length of the spring. I can fiddle about with these parameters and see the effect on the curve, keeping the other terms constant as they represent the geometrical layout of the system. It also means I can select the closest spring to what I want from a manufacturer's catalogue, and then tweak the geometry parameters to get back to almost exactly the behaviour I would have achieved if I had been able to have a spring custom-wound to my specs. Seems like a lot of effort? Well if you're a geek it is cool, trust me. The suspension is my favourite part othis car, so I just enjoy playing around with this stuff. Mainly, it saves a hell of a lot of time and money! |
 |
| Continual development still on the Big Twin, as we head into month 26 of the project. The planned upgrades for the second iteration of the big buggy include the Twin .32 engines, lowered front shock towers, revised shock geometry and all-new shocks amongst a few other things. The time came to make the front suspension changes. I was very happy with the way it worked before, just not with the vulnerability of the high shocks and the out-of-scale look. What is needed is to find a way of getting the same (or better) performance without the downsides of the old design. You could do it by trial and error, but there's a lot of stuff to change: Shock length Shock angle (range adjustable) Shock travel to length ratio Oil volume When you have to make all the parts, trial and error really isn't great. If the performance is not as expected, you are faced with making a lot of parts again to a slightly different design, and that takes a lot of time. Time you could be working on improving the rest of the vehicle, or maybe even driving it! (There's always that chance). What I decided to do is simulate the setup as it is currently, then change some parameters in the model to what I want (i.e. incorporate the design changes for the buggy) and re-simulate the system to see the performance change. I want the simulation to be accurate, just because it is something I enjoy doing, but it is not necessary to go completely to town unless major performance changes are desired. Seeing as I want to minimise performance difference, a totally accurate model is not entirely necessary because we are looking at a small difference (minimised) in performance. However, this model takes every controlling parameter into account (as far as springing is concerned), so it should be possible to predict what extreme changes in suspension design have on the way the system works. |
| There is another benefit to mathematically modelling the suspension system. With further terms added (and measurements made*), damping can be modelled as well as springing. Then you can predict the complete behaviour of the suspension when a given bump profile is travelled over at a given speed. Ultimately you could work out a complete equation of motion for the car, but that wouldn't really offer much without being combined with real life testing. And to do that, you of course have to build the car anyway. *You can't reliably work out damping forces with the knowledge of oil viscosity and damper geometry etc, at least not very accurately using these methods. The problem is because of the vast speed ranges the suspension compresses at. Fluid mechanics equations can usually be solved for special case situations, but to apply to broad ranges in velocity are far more complicated. It's much more reliable to measure the damping force for different applied velocities (to the damper unit). |