|
El objetivo
de este proyecto es la realización por parte de astrónomos
amateurs con telescopios de montura ecuatorial o de tipo altazimutales
un sistema de círculos graduados digitales utilizando los
encoders de un mouse para PC.
Las principales ventajas
de este sistema son el bajo precio de construcción del mismo
y la calidad de la prestación ya que por medio de este sistema
podrán encontrarse fácilmente objetos celestes con
la ayuda de los ordenadores.
Si bien es cierto que
parte del encanto de la astronomía amateur es la búsqueda
y luego la observación de objetos, a veces resulta engorroso
en la oscuridad leer los círculos graduados del telescopio
y se pierde tiempo para la observación.
Seguramente a muchos
aficionados se les ha ocurrido la idea de utilizar el movimiento
adaptado del puntero (la electrónica y los encoders) del
mouse para adaptarlo al telescopio pero no han tenido acceso al
software necesario para hacer las conversiones o desconocen cuestiones
de DOS para hacerlos funcionar. Desde la aparición de Windows
´95 y ´98 se hace difícil saber exactamente que
es lo que está sucediendo en nuestras computadoras al cargar
un programa u otras cuestiones que anteriormente podían entenderse
a nivel de sistema operativo, pareciera que los nuevos Windows han
incorporado un manto de belleza al sistema ocultando su base.
El proyecto original
para utilizar los encoders de un mouse se encuentra desarrollado
por Dan Stixrud en su página de Internet http://www.amsky.com/atm/accessories/mouse/mouse.html
utilizando un Digital Setting Circles hecho en casa, el Micro-Guider
I cuyos planos están disponibles por medio de David Lane
de Nova Astronomics en www.nova-astro.com.
También ofrece gratuitamente un programa escrito por
Jonathan Rock (puede bajarse desde allí) que es el que utilizaremos
en este proyecto.
NOTA: Si Ud. Corta
su mouse, lo hará bajo su propio riesgo. Las notas que se describen
a continuación han funcionado bien para mi pero no seré
responsable si siguiendo estos pasos Ud. destruye su mouse o tiene
problemas con su ordenador.
Es importante hacer
notar también que una vez cortado el mouse Ud. pierde la garantía
sobre el producto.
ENCODERS OPTICOS
Normalmente los encoders
de un mouse común de PC tienen una resolución baja comparada
con la de los encoders comerciales.
La resolución de
un mouse se mide en puntos por pulgada, normalmente los programas
que vamos a utilizar exigen saber la resolución del dispositivo.
No es necesariamente cierto que la resolución que pueda indicar
el mouse sea la que finalmente obtengamos, ya que la resolución
depende en este caso del diámetro del perno que sostiene la
estrella dentada del mouse y la superficie de rozamiento del telescopio.
Hasta el momento yo he
probado con dos tipos de mouse, estos cuentan 180 pulsos en una vuelta
de 380 grados de rueda dentada pero poseen distinto espesor de perno
con lo cual la resolución final para una misma superficie de
rozamiento, varía.
Lo mínimo necesario
para que el sistema funcione correctamente es obtener resoluciones
superiores a los 4000 pulsos. Vale decir, a encoders de baja resolución
mayores superficies de rozamiento.
Yo elegí un mouse
Sunshine que acoplando los encoders a los círculos graduados
de un telescopio Meade Starfinder 8´ da alrededor de 11100 pulsos
en el eje de ascensión recta y 4920 pulsos en el de declinación.
(uno es mas grande que el otro). Como ejemplo podemos decir que para
un mouse de 200 dpi se necesita una superficie de rozamiento de 6
½ pulgadas para obtener una resolución de 4000 pulsos.
El mouse Sunshine decía tener 520 dpi (perno de 3 mm) es por
eso que con superficies de rozamiento no muy grandes se obtienen altas
resoluciones.
El acoplamiento de los
encoders al telescopio no se describe aquí ya que depende de
la montura y variedad de cada telescopio.
LA DISECCION DEL MOUSE
Existen gran variedad de
mouses en el mercado, de modo que es difícil dar un solo ejemplo
de cómo cortar y separar los encoders de la placa electrónica,
veremos dos ejemplos.
El primero es un mouse
Genius CLIXes modelo Jx. Este mouse trae encoders muy fáciles
de adaptar y similares a los del LOGITECH ya que los LEDS están
integrados en una sola pieza de plástico y poseen pernos metálicos.
El procedimiento sería cortar con cuidado la placa del circuito,
separando los encoders y restaurando los caminos dañados agregando
un cableado entre la placa y los encoders. Es recomendable utilizar
cables cortos y lo mas maleables posible para facilitar la instalación
en el telescopio.
Es muy importante como
procedimiento copiar en papel o escanerar el circuito antes de cortar
para estar seguro de las conexiones dañadas y las que deben
realizarse entre los encoders y la placa del mouse.
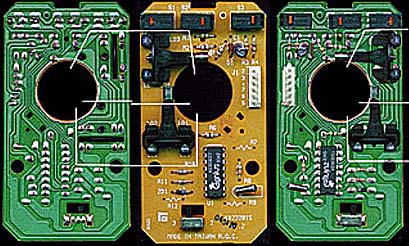 Vista
posterior
Vista superior Vistas
superpuestas
Vista
posterior
Vista superior Vistas
superpuestas
Para hacer la disección
es útil una hoja de sierra nueva (cuidado con los dedos), las
conexiones deben realizarse con un soldador pequeño y un poco
de estaño cuidando de no sobrecalentar los componentes fijos
de la placa y se recomienda no soplar las soldaduras para enfriarlas
ya que la solidificación del estaño no es tan buena.
Los cables deberán
pre estañarse cuidando de tocar la punta de los cables lo menos
posible ya que la grasitud de los dedos impide la fijación
de la resina y el estaño.
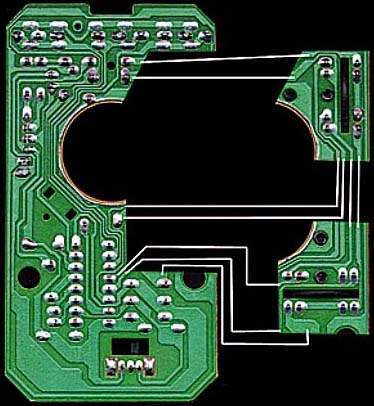 Aquí se observan
las conexiones para este tipo de mouse.
Aquí se observan
las conexiones para este tipo de mouse.
NOTA: Es muy importante
probar el conteo de los encoders antes de acoplarlos al telescopio,
pueden olvidarse algunos enlaces a soldar o puede suceder como sucedió
con este modelo de mouse que contaba 180 pulsos hacia un lado en una
rotación de 360 grados pero al volver, en vez de llegar a cero
contaba 1, y sumaba progresivamente el error. (puede solucionarse
con software pero es preferible descartarlo)
Ahora veremos la disección
del Sunshine que es un mouse mas moderno y posee un solo LED para
cada encoder, la placa de circuito es mas pequeña, la única
desventaja de este modelo de mouse es que el sostén de la rueda
dentada es solidario de la carcaza por lo cual deberá cortarse
no solamente el circuito sino también la carcaza del mouse.
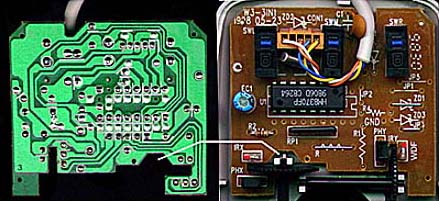 Como se puede observar,
es mucho mas fácil cortar este tipo de mouse ya que solamente
es necesario separar un solo encoder mientras que el restante puede
dejarse en la placa y acoplarlo integralmente al telescopio.
Como se puede observar,
es mucho mas fácil cortar este tipo de mouse ya que solamente
es necesario separar un solo encoder mientras que el restante puede
dejarse en la placa y acoplarlo integralmente al telescopio.
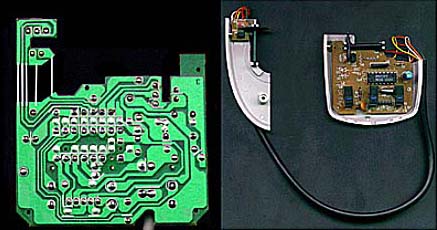
En esta
fotografía se observan las uniones a realizar y los dos encoder
terminados al que se le conectará el cable de conexión
al ordenador que viene provisto por el fabricante.
EL
PROGRAMA ENCODER.EXE
http://www.amsky.com/atm/accessories/mouse/encoder.html
http://www.worldaccessnet.com/~dstixrud/Jon/Encoder.zip
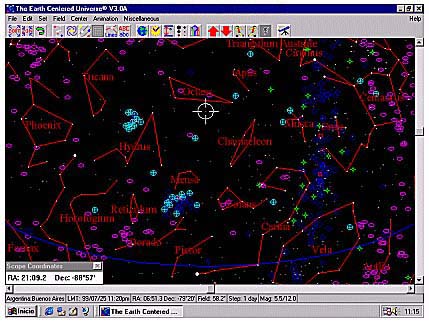
La finalidad de este programa
es establecer una interface entre los encoders del mouse y una computadora
corriendo un programa de tipo planetario o posicionamiento del cielo
(The Sky, ECU, DeepSky), el programa es gratuito y según dice
su autor, Jonathan Rock, no ha sido diseñado para la venta.
La configuración
del sistema requiere dos computadoras enlazadas entre si, la primera
de ellas puede ser una vieja PC del tipo 386 DX2 o mejor, corriendo
un sistema operativo 5.0 como mínimo, en ella debe correrse
también el driver correspondiente al mouse a utilizar, es necesario
fabricar un cable serial RS-232 del tipo NULL que veremos mas adelante,
y finalmente una computadora donde debe correrse el programa planetario.
Si bien es necesario utilizar dos computadoras, la primera de ellas
puede comprarse usada por poco dinero ya que se trata de una PC poco
potente, e incluso con monitor blanco y negro y solamente para correr
un programa de DOS.
Como vimos anteriormente,
el programa CONVERT.EXE puede ejecutarse en una PC portátil
y transportarse junto con el telescopio, este sistema es un poco mas
voluminoso y parecería conveniente dejarlo fijo junto al telescopio,
a pesar de esta desventaja, el resultado final es mucho mejor ya que
puede verse en la pantalla una mirilla que indica exactamente hacia
donde apunta el telescopio y por otra parte funciona tanto para monturas
ecuatoriales como de tipo Dobson.
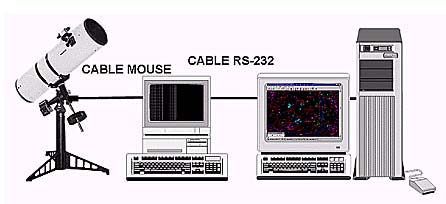
Los encoders del mouse
(conectados a su placa correspondiente) se conectan a la primera computadora
en la entrada COM1 donde normalmente se conecta el mouse. Esta computadora
actúa como una interface entre el telescopio y la computadora
que corre el programa planetario.
El funcionamiento del programa
ENCODER requiere que se encuentre instalado y funcionando el driver
del mouse a nivel DOS, generalmente el programa ejecutable es GMOUSE.COM
(como en el caso anterior es imprescindible quitar la aceleración
que normalmente se le aplica al mouse, esta variable deberá
verificarse y anularse si se encuentra activa), si se desea que la
computadora arranque y cargue automáticamente el driver del
mouse y el programa encoder con las variables correspondientes, puede
agregarse al archivo autoexec.bat las líneas:
gmouse
encoder v p 2 x 11100
y 4920
Las variables del programa
encoder se verán mas adelante.
El sistema funciona de
la siguiente forma, los encoders envían la información
a la placa del mouse, ésta convierte los pulsos eléctricos
en cuentas de pulsos y las envía a la primera PC por el cable
serial que viene con el mouse, el driver del mouse lee la información
de los pulsos del mouse que recibe por la puerta serial (normalmente
COM1), encoder.exe verifica el driver del mouse periódicamente
para ver si ha habido cambios en el conteo (o movimiento del telescopio)
de los encoders ópticos, luego encoder.exe toma y actualiza
la información y la convierte a un protocolo que pueda ser
entendido por los programas planetarios y la envía por la puerta
serial (COM2) por medio de un cable RS-232 tipo NULL (se describe
mas adelante) a la puerta COM2 de la segunda computadora y el programa
planetario hace las conversiones correspondientes y muestra en pantalla
el movimiento y las coordenadas de posición.
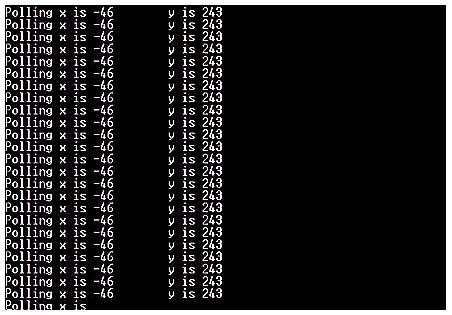
El programa ENCODER.EXE
es capaz de emular varios protocolos como Bseg, JMI´s NGC-MAX
y MicroGuider III y permite visualizar el conteo en pantalla (para
verificar el buen funcionamiento de los encoders ópticos),
permite también invertir la posición de los encoders
(en caso de haberlos instalado invertidos en los ejes de ascensión
recta y declinación) y exige la resolución para el eje
x e y (por omisión 4000 para ambos ejes).
 Las variables de la línea
de comandos para ejecutar el programa ENCODER.EXE son las siguientes:
Las variables de la línea
de comandos para ejecutar el programa ENCODER.EXE son las siguientes:
-h un pequeño
mensaje de ayuda para recordar los parámetros
-v para ver el conteo
de los pulsos en pantalla
-t (MG3, BSEG) para
indicar el tipo de protocolo de salida. Por omisión es MG3.
-r para invertir
los ejes x e y en el protocolo de salida (no en pantalla)
-x (valor numérico)
resolución del eje x. Por omisión 4000.
-y (valor numérico)
resolución del eje y. Por omisión 4000.
-p (número
de puerto) este es el número de puerta COM por donde sale la
información de datos de posición a la computadora que
corre el programa planetario.
Un ejemplo de la línea
de comandos para los encoders Sunshine sería la siguiente:
encoder v r p 2 x 11100
y 4920 (ENTER)
donde v envía el
conteo a la pantalla, -r invierte los encoders, -p 2 envía
la información de salida a la puerta COM2 (es imprescindible
dejar un espacio entre la p y el número 2), -x resolución
del encoder a 11100/rev (es imprescindible dejar un espacio entre
la x y el número), -y resolución del encoder 4920/rev
(es imprescindible dejar un espacio entre la y y el número).
Una vez diseccionado el
mouse es conveniente probar el buen funcionamiento de los encoders
acoplando un pequeño alambre rígido al perno de la estrella
dentada, para ello corremos el driver del mouse, luego el programa
encoder con salida en pantalla (encoder v p 2) y damos una vuelta
de 380 grados hacia un lado y hacia el otro para verificar que el
conteo sea exacto.
Luego instalamos los encoders
en el telescopio y debemos determinar la resolución final que
arrojan con respecto a las superficies de rozamiento que tengamos.
Siempre con el driver de
mouse instalado corremos el programa encoder con salida a pantalla
y asignamos un número alto a la resolución x e y ya
que es posible que los encoders superen por mucho los 4000. (encoder
v p 2 x 15000 y 15000) luego damos una vuelta completa a ambos
ejes del telescopio y determinamos la resolución final que
hemos obtenido. Esta información es la que realmente debemos
asignar a la línea de comandos de encoder en los ejes x e y
y también será la que configuremos en el programa planetario.
(en algunos modelos de mouse debe duplicarse el valor de conteo en
la línea de comandos para evitar el sobrepaso).
EL CABLE SERIE RS-232
TIPO NULL
Como describíamos
anteriormente, ambas computadoras están interconectadas por
medio de un cable serie RS-232, cuyo armado es simple y las conexiones
pueden verse en este diagrama:
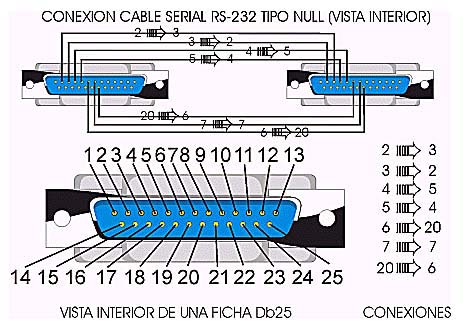
Las vistas de este diagrama
son de la parte interior del conector, hay que prestar especial cuidado
con este punto ya que es bastante fácil confundirse a pesar
de que cada pin se encuentra numerado de ambos lados de la ficha.
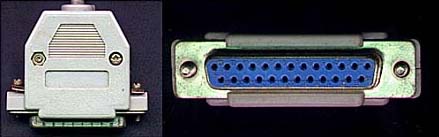
Las fichas pueden comprarse
en cualquier casa de electrónica y se denominan comúnmente
Db 25 hembra, las de ambos extremos son iguales, el cable puede ser
de 7 alambres y generalmente traen cada cable de un color pero se
repite en general el blanco de modo que sería útil un
tester o una lamparita y una pila para verificar las puntas en caso
de utilizar varios de los blancos.
Este cable se suele utilizar
para transferir información entre computadoras, es importante
verificar el buen funcionamiento de la conexión entre las dos
máquinas para ir descartando errores.
Para la verificación
pueden utilizarse los programas INTERLNK.EXE e INTERSVR.EXE que antiguamente
traía incorporado el sistema operativo 6.0. Normalmente se
ejecuta el INTERSVR.EXE en una máquina y en la otra el INTERLNK.EXE
y si todo anda bien, puede verse el disco rígido y las disketeras
de la otra computadora lo cual verifica que pueden transferirse datos
entre ambas.
OPERACION DEL SISTEMA
Aquí se describen
los pasos necesarios para iniciar el sistema:
1. Verificamos que las
conexiones entre encoders y computadora y computadoras entre sí
estén correctas.
2. Inicializamos la primera
PC, ejecutamos el driver del mouse (sin aceleración), y ejecutamos
ENCODER con los parámetros correspondientes.
3. Si se está utilizando
monturas de tipo Dobson, es necesario nivelar la base del telescopio
y apuntar el mismo a 0° o 90° dependiendo en que posición
de alineación exija el programa planetario. Si se utilizan
monturas ecuatoriales se deberá poner el telescopio en estación
como se hace habitualmente.
4. Los siguientes pasos
dependen del programa planetario que se esté utilizando pero
normalmente son los siguientes:
En la segunda PC corriendo
el programa planetario, se debe buscar el menú configurar la
interface de los encoders, aquí debemos seleccionar MicroGuider
III si está disponible o cualquier otro protocolo compatible
con ENCODER. Luego se deberá configurar la puerta COM a donde
se ha conectado el cable RS-232 (normalmente COM2 si es que no hay
instalado un módem u otros dispositivos en esta computadora).
Luego debe indicarse la resolución obtenida por los encoders
de nuestro telescopio que será la misma que pusimos en la línea
de comando de ENCODER. Luego configuramos la puerta COM para 9600
baudios, 8 bits de datos y no paridad. (9600 baud, 8 data bits, no
parity).
5. Ahora inicializamos
la comunicación entre el programa planetario y los encoders
y debemos observar la mirilla y las dos computadoras comunicándose
sin error.
6. La mayoría de
los programas planetarios piden alineamiento del telescopio con objetos
conocidos en el cielo, normalmente 2 estrellas para monturas tipo
Dobson y una para monturas ecuatoriales.
7. Finalmente es conveniente
verificar las posiciones que arroja el programa planetario con aquellas
que indican los círculos graduados del telescopio hasta encontrar
la resolución óptima de los encoders.
MONTAJE
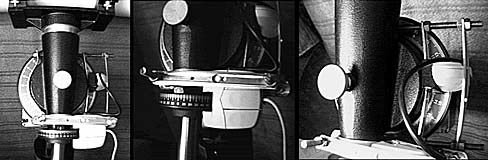
El montaje final de los
encoders en el telescopio ha de variar según el tipo de montura
utilizada.
[Desarme]
[Procesamiento]
[Resolución] [Magnitudes]
[Reduc. Focal] [Foto.
del Sol]
[Otras Fotos]
[Círculos Diditales C/M PC]
[Tangente] [Links]
COPYRIGHT (c) 1999 POR
CRISTIAN WILLEMOËS.
Imágenes, fotografías
y textos son propiedad del autor. No se permiten las copias de imágenes
o texto de este documento o sitio sin la autorización expresa
del autor.
|