Part 1: Signal and System Modeling Concepts :

1-1) This part focus with systems
and the interaction of signal in systems . But what is a system according with the
Engineer dictionary defines a systems as “an integrated whole even though composed of diverse , interacting structures or sub junctions” in few words is a
combination and interconnection of several components to perform a desired task. We will focus our attention to linear systems because most of the engineering
aspects are closely approximated by linear systems and exist many techniques for analyzing them.
A signal may be considered to be a function of time that represents a physical variable of interest associated with a system . In electrical systems , signals usually represent
currents and voltages , whereas in mechanical systems , they represent forces and velocities.
1-2) Signals Models:
Deterministic Signals : A deterministic signal can be modeled as completely specified functions of time .
Example: x(t)= At2+Bt -∞ < t < ∞ . (1-1)
Where A and B are constants shown in the following figure (1-1) .
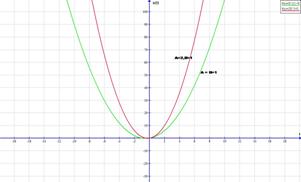
Fig 1-1
(a) Signal of equation 1.
An example of a deterministic signal that is not continuous function of time is the unit pulse , denoted as ∏ (t) and defined as
 (1-2 )
(1-2 )
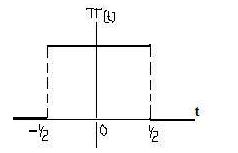 Fig 1-2
Unit pulse signal
Fig 1-2
Unit pulse signal
2) Periodic
and Aperiodic signals
A signal x(t) is periodic if only if :
x(t+T0)= x(t) -∞ < t < ∞ . (1-3)
where the constant T0 is the period . The smallest value of To such that (1-3) is satisfied is referred to as the fundamental period simply referred as a period .
Any deterministic signal satisfying (1-3) is called aperiodic.
An example of a periodic signal is a sinusoidal signal:
![]() -∞
< t < ∞
(1-4)
-∞
< t < ∞
(1-4)
Where A is the amplitude , ![]() is the frequency in hertz
and
is the frequency in hertz
and ![]() the angle of phase.
the angle of phase.
We know that ![]() where
where ![]() is the frequency in rad/seg.
is the frequency in rad/seg.
The Period of this signal is : ![]() which can be verified
by direct substitution in equation (1-3) .
which can be verified
by direct substitution in equation (1-3) .
![]()
From equation (1-4) we have:

![]() ………. (1-5)
………. (1-5)
But cos(2![]() ) =1 and sin(2
) =1 and sin(2![]() )=0 in equation (1-5) we have :
)=0 in equation (1-5) we have :
![]() since
since ![]() and
and ![]() thus the equation
(1-3) is satisfied.
thus the equation
(1-3) is satisfied.
The sum of two or more sinusoids may or may not be periodic , depending on the relationships between their respective periods or frequencies .
If ![]() and
and ![]() are the frequencies of
two sinusoids where n and m are integers
:
are the frequencies of
two sinusoids where n and m are integers
: ![]() is called the fundamental frequency , thus their
is called the fundamental frequency , thus their
corresponding periods ![]() and
and ![]() are related by
are related by ![]() .
.
Fig. 1-3 Graph of a sinusoidal
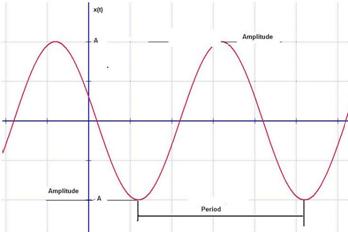 Signal
Signal
3) Phasor
Signals and Spectra
When we are working with signals it is convenient to represent real signals in terms of complex quantities that is why we use phasors , according
phasors theory a signal can be represented by :
![]() …….(1-6)
…….(1-6)
For a sinusoidal signal we can represent the real part (Re(…)) by:
![]() -∞ < t
< ∞ (1-7)
-∞ < t
< ∞ (1-7)
The complex signal is:
![]() -∞
< t < ∞
(1-8)
-∞
< t < ∞
(1-8)
This rotating phasor signal have three parameters : A the amplitude , ![]() the phase . and
the phase . and ![]() >0 the radian
frequency .
>0 the radian
frequency .
Another important expression is the Euler’s which a complex variable can be represented in terms of sin and cos.
![]() …………………………(1-9)
…………………………(1-9)
![]() …………………………(1-10) thus
…………………………(1-10) thus
![]() …………………………(1-11)
…………………………(1-11)
![]() …………………………(1-12)
…………………………(1-12)
A sinusoidal function ![]() can be represented
using equation (1-11)
can be represented
using equation (1-11)
![]() , -∞ < t < ∞ (1-13)
, -∞ < t < ∞ (1-13)
Which is a representation in terms of complex conjugate quantities.
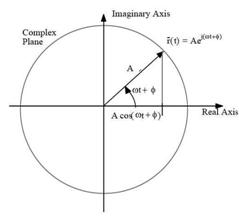 Fig. 1-4
Phasor representation of a wave
Fig. 1-4
Phasor representation of a wave
We can plot the amplitude and phase in two ways.
Single-sided amplitude and phase spectrum is used because these spectral plots have points or lines only for positive frequencies.
Double-sided amplitude and phase spectrum is used at ![]() and
and ![]() positive and negative
frequencies , it is necessary to note that double-sided
positive and negative
frequencies , it is necessary to note that double-sided
spectra the lines at negative frequencies are present because is necessary to add complex conjugate phasors , Amplitude spectrum has even symmetry about
the origin and the phase spectrum has odd symmetry about the origin.
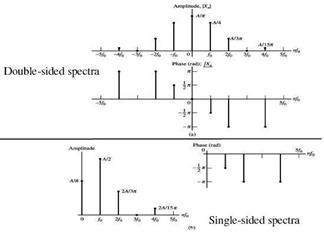
Fig. 1-5 Amplitude and phase spectra
4)
Singularity Functions
This aperiodic signals play an important role in the communication systems .We begin by showing the unit step and unit ramp and using them to represent
more complicated functions .
Unit step function (Heaviside function ) is defined as :
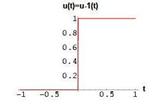
![]() …………………………(1-14)
…………………………(1-14)
Fig 1-6 Unit step function
The value of ![]() at t=0 will not be
specified at this time (next we will show that u(0)=1/2 ) Other singularity functions are defined in terms
of
at t=0 will not be
specified at this time (next we will show that u(0)=1/2 ) Other singularity functions are defined in terms
of ![]()
by the relation
![]() i=……,-2,-1,0,1,2……. (1-15)
i=……,-2,-1,0,1,2……. (1-15)
Taking first derivative to equation (1-15) we can represent as:
![]() ……………………. (1-16)
……………………. (1-16)
Unit ramp function using equation (1-15) in the unit step function we have
![]()
![]() (1-17)
(1-17)
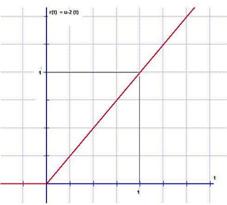
Fig 1-7 Unit ramp function
Unit parabolic function using equation (1-15) in the unit ramp function we have
![]()
 ……………………….. (1-18)
……………………….. (1-18)
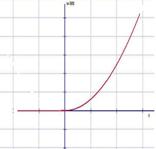
Fig 1-8 Unit parabolic function
We can shift any signal in the time axis , if we replace ![]() by
by ![]() if
if ![]() >0 the signal is shifted to the right , if
>0 the signal is shifted to the right , if ![]() <0 the signal is shifted to the left .
<0 the signal is shifted to the left .
Using in the unit step function with ![]() =1/2 we have:
=1/2 we have:
 …………………….
(1-19a)
…………………….
(1-19a)
Or
 ……………….......... (1-19b)
……………….......... (1-19b)
Using equation 1-19 we can represent unit pulse function
![]() (1-20)
(1-20)
Another important function is the unit impulse function or delta function.
Unit impulse function or delta
function ![]() which has the
following properties :
which has the
following properties :
![]() …………………………..(1-21a)
…………………………..(1-21a)
And
![]() ……………………………………(1-21b)
……………………………………(1-21b)
From equation 1-21b we can state that the area of the delta function is unity.
We have a mathematical definition of the unit impulse function proceeds by defining in terms of the functional :
![]() ……………………………………(1-22)
……………………………………(1-22)
Where ![]() is continuous at
is continuous at ![]() .
.
![]() has the following
properties:
has the following
properties:
![]() ……………………………………(1-23)
……………………………………(1-23)
Using the equation 1-23 with a=-1 we can see that : ![]() that is an even
function.
that is an even
function.
Another property of the delta function is the sifting property :
![]() ……………………………………(1-24)
……………………………………(1-24)
![]() is continuous at
is continuous at ![]() , if we change
, if we change ![]() in the equation 1-24
in the equation 1-24
We have :
![]() ……………………………………(1-25)
……………………………………(1-25)
An alternative form of the equation 1-22 is :
![]() ……………………………………(1-25)
……………………………………(1-25)
Equation 1-26 is known as a convolution
integral.
If we have integrals with finite limits moreover defining ![]() to be zero outside a
certain interval
to be zero outside a
certain interval ![]() , thus :
, thus :
 ………….…………………(1-26)
………….…………………(1-26)
Another properties of delta function are:
![]() …………………………………(1-27)
…………………………………(1-27)
![]() …………………………(1-28)
…………………………(1-28)
In general if the nth derivative
of ![]() exists and continuous
at
exists and continuous
at ![]() it can be represented
by :
it can be represented
by :
![]() ………………(1-29)
………………(1-29)
Now that we know delta function we may represent unit step function in terms of delta function.
![]() ………………(1-30)
………………(1-30)
Or taking first derivative to equation (1-30) we can represent as:
![]() ………………(1-31)
………………(1-31)
5) Energy
and Power Signals
There are three classifications of signals according to study of energy and power . Those having finite energy , those having finite average power and
signals that satisfy neither .
Suppose that ![]() is the voltage across
a resistance
is the voltage across
a resistance ![]() producing a current
producing a current ![]() , thus the instantaneous power per ohm is :
, thus the instantaneous power per ohm is :
![]() …………………………(1-32)
…………………………(1-32)
Integrating equation 1-32 over interval ![]() we have :
we have :
Total energy (per ohm):
![]() Joules ………………(1-33)
Joules ………………(1-33)
Average power (per ohm) :
![]()
Working with an arbitrary signal ![]() :
:
Total energy (per unit resistance):
![]() Joules ……….………(1-35)
Joules ……….………(1-35)
Average power (per unit resistance) :
![]()
According equations 1-35 and 1-36 , we may define the following classes of signals:
a) ![]() is a energy signal if
and only if 0<E<
is a energy signal if
and only if 0<E<![]() , so that P=0.
, so that P=0.
b) ![]() is a power signal if
and only if 0<P<
is a power signal if
and only if 0<P<![]() , so that E=0.
, so that E=0.
c) Signals that satisfy neither property are therefore neither energy nor power signals.
Average Power of a periodic signal
We often work with periodic signal ![]() with period
with period ![]() . We can shown that the average power is:
. We can shown that the average power is:
 ………………..……………(1-37)
………………..……………(1-37)
Go to second part Go to second part : System Modeling and Analysis in the time domain