Robo-
innovations by
Savvas Afantenos

| | | | ||||
Other interest
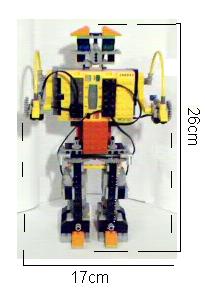
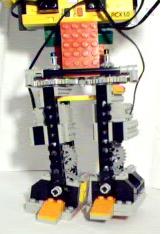
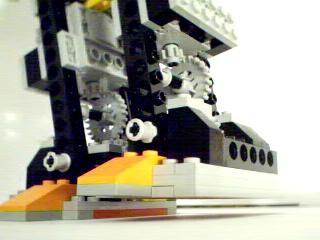
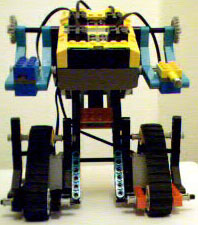
The robot above is my first walking robot. It can move by changing the center of gravity from side to side, lift up the opposite leg and then actually walk. It goes forward, backwards and can turn right or left. When its arm hits somewhere, it goes three steps backwards and then turns. For this I used 1 RCX, 2 touch sensors and 3 motors
CARS
This is the data logging robot of mine.It can move around by random, but also I can control it from a distance with a joystick. To accomplish that I use the program BrickCC3.It can take measurements for light and temperature, see the pictures, but also from other generic sensors

DIVX
MOVIES

In the left you can see my first robot. It can move around, when its arm hits an object goes back and then turns, turns its head right-left and can also detect light and follow it. For this robot I used 2 motors, one micro-motor, 2 touch sensors and 2 light sensors





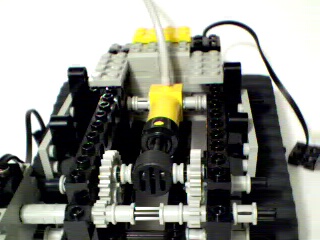
This robot does the same things with the one above, but it can also grab. To accomplish this it uses one air pump as a compressor and 2 pneumatic tubes. See the pictures with the custom made compressor and the arm. When something goes into the hands, the light detector sends the massage to a second RCX to close the fingers