| Electrónica: | Programación: | Links: | Otros: | Pagina: |

Resultados Obtenidos
El proyecto realizado quedo integrado en general por el Hardware y Software dise�ado. Por su parte el hardware se conforma con la interfaz y el brazo mec�nico con todos sus componentes; por su parte el software implementa el algoritmo de control y presenta una interfaz grafica en ambiente Windows.
Cabe resaltar que por su parte la interfaz se realiz� tratando de aprovechar al m�ximo los recursos con los que se dispone en una PC actual, concretamente al implementar los puertos de salida/entrada directamente de la computadora, estos espec�ficamente fueron el puerto paralelo, el puerto para juegos del JoyStick y el puerto tipo bus serial universal (USB), lo que nos ahorr� la elaboraci�n de tarjetas para la interfaz ya que estas tarjetas son las propias de la PC, y que adem�s de ser mas econ�micas son de f�cil configuraci�n mediante software del mismo sistema operativo. Se logr� formar un robot que al conjuntar la parte mec�nica, electr�nica y el software funcion� de manera aceptable, ya que muestra los movimientos b�sicos de un brazo y la manera de controlarlos, proporcionando una plataforma para la experimentaci�n de nuevos dispositivos que se le pueden a�adir, o modificar los existentes, ya que es mas f�cil modificar lo que ya se tienen hecho o empezar un proyecto desde cero.
Circuito de Interfaz y Control
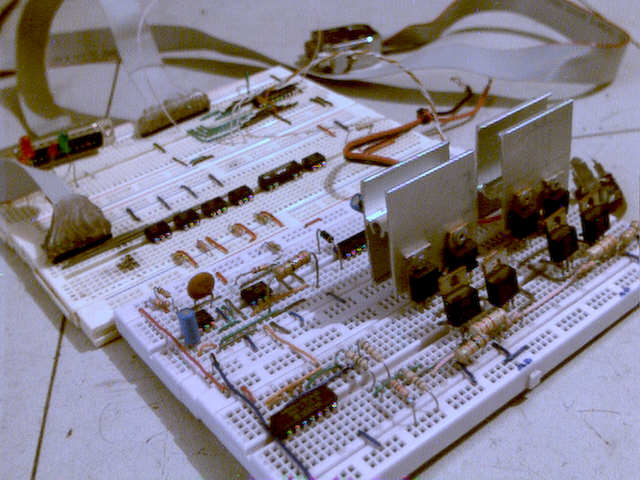
En la fotograf�a se muestra el circuito provisional con el que se control� y midi� la posici�n del brazo. En esta se pueden apreciar la etapa de potencia que consta principalmente de los transistores del puente H y los optoacopladores que le proporcionan la se�al de control, adem�s se pueden apreciar los buses y conectores que conducen las se�ales de interfaz con la PC.
Cabe se�alar que esta etapa mostrada sirve solo para el control de uno de los motores; contando el prototipo con dos etapas similares. Adem�s para esta Circuiter�a ya se ha dise�ado el circuito impreso que posteriormente se fabricar� para su implementaci�n en el prototipo.
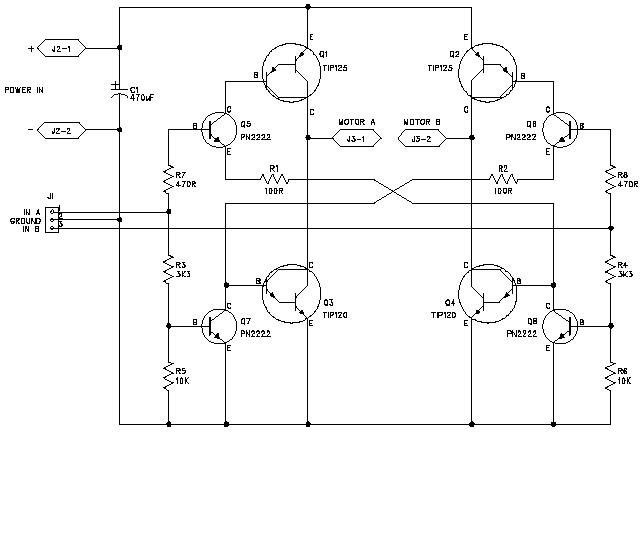
El diagrama utilizado para armar los puentes H que forman los circuitos de control de potencia se muestra a continuaci�n
Interfaz de Salida
El circuito realiza la funci�n de aislamiento galv�nico entre el puerto paralelo del ordenador y el circuito exterior, adem�s de convertir los niveles de tensi�n TTL en niveles de 0 y +12V, ya que dichos niveles ser�an insuficientes para actuar sobre las entradas del puente H y el motor.
Para lograr esto se colocaron seis etapas id�nticas compuestas por las resistencias limitadoras de corriente (R1 a R6), que evitar�n que se sobrecargue el puerto, al actuar sobre los LED que llevan integrados los optoacopladores (Opto1 a Opto6), que son los encargados de realizar la separaci�n galv�nica. Estos LED polarizan la base de un fototransistor, tambi�n integrado en el optoacoplador, y que tiene conectado su colector al positivo de alimentaci�n (12V) y su emisor a masa (0V) a trav�s de una resistencia (R7 a R12), por lo que act�an como simples interruptores: si en el puerto aparece un "1" (5V), se polariza directamente el LED correspondiente que a su vez polariza al transistor, que entra en conducci�n, apareciendo en los terminales de la resistencia de salida una tensi�n igual a la de alimentaci�n, que ser� la que utilicemos en la etapa de circuitos de control de potencia. En caso contrario tendremos una tensi�n de 0V a trav�s de las resistencias de salida.
El software
Se logr� hacer la interfaz con el hardware de la computadora desde Visual Basic, esto no es f�cil ya que este lenguaje no cuenta con rutinas apropiadas para hacer este trabajo, sin embargo se logr� implementar satisfactoriamente los algoritmos de reconocimiento de voz y desarrollar el algoritmo de control requerido para manejar todas las variables del sistema controlado y adem�s de integrar todas las otras partes que comprenden este programa caracter�stico.
Se logro incorporar satisfactoriamente una c�mara de video digital en el programa, de manera tal que al mismo tiempo de observar las variables o entradas del robot mediante gr�ficos exhibidos en la pantalla de la computadora se pueda observar el entorno del mismo, de esta forma se ampl�an los datos o perspectivas obtenidas del desempe�o del robot, para el mejor manejo de este por parte del usuario.
El Programa posee un asistente virtual que nos informa de las acciones ejecutadas. Adem�s tiene la facultad de Reconocimiento y Sintetizado de voz, aprovechando nuevamente la capacidad de la computadora.
El programa tiene integrados un buen numero de tecnolog�as de vanguardia, ya que incluye o une tecnolog�as como son el reconocimiento de voz y sintetizado de la misma, tecnolog�as poco usadas pero de gran relevaci�n en el futuro, tambi�n integra un asistente, que da mas vistosidad al programa, quiz� de alguna manera haciendo mas ameno y divertido gracias a la incorporaci�n del mismo.
La interfaz del programa conlleva controles �ActiveX� que realzan el programa mejorando su manejo y presentando las diferentes variable a controlar de una manera grafica y colorida, que atraiga la atenci�n del usuario del programa.
El listado que se presenta a continuaci�n, contiene el c�digo completo del programa, mas la definici�n de todos los objetos que lo componen, incluyendo la posici�n relativa que estos ocupan dentro de la ventana correspondiente, conjuntamente con los valores iniciales del programa y todos los archivos anexos que este utiliza (m�dulos).