| Electrónica: | Programación: | Links: | Otros: | Pagina: |
Alcances y Limitaciones
Alcances
Los alcances de este proyecto son varios y se dividen en dos categor�as: Software y Hardware:
Software
El robot es capaz de reconocer comandos de voz, en idioma espa�ol para este caso, pero a�n siendo configurable para trabajar con otros idiomas, como pueden ser: Ingles, Franc�s, Japon�s, Italiano, Alem�n o Chino con solo instalar el archivo requerido que contiene el l�xico para cada idioma. �
As� mismo es capaz de sintetizar no solamente mensajes de voz pregrabados, sino de sintetizar cualquier texto escrito. �
Mediante el reconocimiento de voz es posible accionar todo el funcionamiento del brazo robot con un simple micr�fono. �
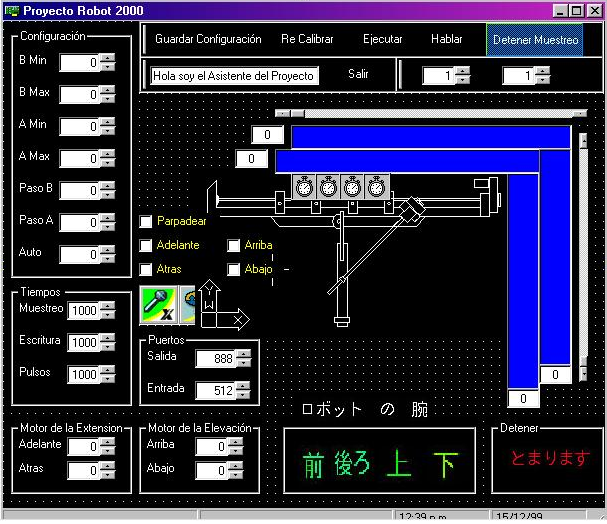
Tiene la capacidad de accionarse no solo mediante los comandos de voz sino tambi�n mediante la utilizaci�n de barras, botones, cajas de texto, los cuales son accionados mediante las interfases comunes del Windows (teclado y rat�n). Estos controles son de uso alterno al reconocimiento de voz. �
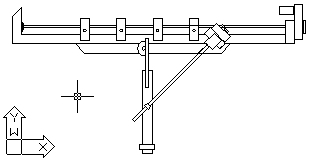
Por otra parte el programa representa gr�ficamente la posici�n del brazo robot mediante los valores suministrados por los sensores de posici�n con los que cuenta el robot. �
Incorpora un asistente virtual que ayuda al usuario a familiarizarse r�pidamente con el programa, asiendo su utilizaci�n mas amena y relajada. �
Con la incorporaci�n de la c�mara de video digital es posible obtener una vista panor�mica del entorno en que se encuentra el brazo rob�tico. �
Las Im�genes proporcionadas por la c�mara de video son a color y se presentan sobre una ventana de tama�o conveniente.
Hardware
El robot es capaz de moverse con tres grados de libertad.
Tiene la suficiente potencia para levantar objetos de hasta 2 kilogramos de peso.
Cuenta con un movimiento de elevaci�n de aproximadamente 70� sobre un pivote.
Tambi�n cuenta con un movimiento de desplazamiento longitudinal con una carrera de aproximadamente 40 cm.
Su estructura es de construcci�n r�gida y pude soportar esfuerzos considerables sin deformarse o da�arse.
Limitaciones
Las limitaciones al igual que los alcances se dividen en dos secciones, la gran mayor�a de estas son del hardware. Inicialmente el proyecto se pens� como un veh�culo con un brazo robot recolector montado sobre �l y con una c�mara de video integrada.
Sin embargo al ir desarrollando el modelo se comprendi� que en realidad se trataba de un proyecto de mayor envergadura y muy ambicioso, y que debido a las limitaciones en cuanto al tiempo designado para desarrollarlo fue conveniente enfocarse a una o algunas partes especificas para lograr resultados satisfactorios. Adem�s de la limitaci�n econ�mica que representa adquirir componentes costosos y de no f�cil obtenci�n en el mercado local y nacional.
Hardware
Ya que la construcci�n del modelo se realiz� principalmente con materiales usados o de desecho, �sta presenta ciertas desventajas mec�nicas, una de ellas es la fricci�n entre sus partes m�viles ya que estas est�n maltratadas y no se desplazan �ptimamente.
La velocidad del movimiento de elevaci�n y desplazamiento es relativamente lenta debido al empleo de un mecanismo reductor de velocidad compuesto de engranajes y de un tornillo sinf�n. Sin embargo, esto le brinda un gran par al movimiento y una precisi�n elevada al mismo tiempo.
El brazo debe estar sujetado sobre una base fija y lo suficientemente r�gida y fuerte como para sostener su peso, que es relativamente poco (aproximadamente de 8 kilogramos) y de soportar la presi�n que se ejerce sobre ella producida por la palanca que forma el brazo extendido en cualquiera de sus dos posiciones.
El prototipo al ser al�mbrico, tiene un alcance limitado por la longitud de la extensi�n con que se conecta a la computadora, adem�s es necesario evitar perdidas de se�al en la transmisi�n provocadas por extensiones largas.
La respuesta de los sensores de posici�n no es completamente lineal, lo cual reduce en un peque�o porcentaje la exactitud con la que se mide la posici�n del brazo, que a su vez afecta directamente la forma en que se presenta dicha posici�n en la pantalla.
Software
El programa al contar con reconocimiento de voz requiere de su previa instalaci�n en la computadora en la cual se va a trabajar. Dicho programa cuenta con API�s (Archivos de Intercambio Din�mico de Librer�as �dlls�) de reconocimiento de voz. Estas APIs son los servidores o algoritmos de reconocimiento de voz, as� como las API�s de s�ntesis de voz correspondientes, existen las APIs de diferentes compa��as siendo las m�s importantes Microsoft con un conjunto de programas conocido como SAPI SDK (Speech API Server Developer Kit). Por otro lado est� IBM con el ViaVoice SDK, Tambi�n se encuentra la SAPI de Lucent Technologies, y muchas otras m�s en desarrollo, todas estas API�s consumen grandes recursos en la maquina en la que funcionan, por lo que es necesario contar con un equipo reciente.
Al contar el programa con un c�mara digital es necesario en primer lugar un puerto tipo serie universal (USB), ya que aunque existen c�maras capaces de conectarse en puertos paralelos, su mejor desempe�o lo realizan mediante los USB, aunque de esta manera se consuman recursos considerables en el proceso.
El conjuntar las anteriores tecnolog�as con un programa realizado en Visual Basic da como resultado un programa que necesita una computadora de gran capacidad.