|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
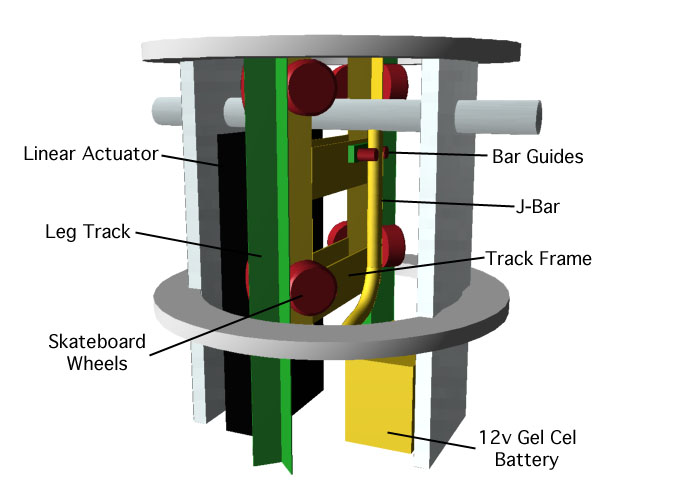
6/5/03 - I have purchased a linear actuator for the third leg extension! Below is a rendering of what I am going to build. It is based on a design that several others in the club have already utilized. My contribution is the skateboard wheel assembly and wheel guide design. It is based on a camera dolly that I built years ago. It should be quite sturdy and prevent any wobbling of the center foot.
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
Click on the picture for a larger view
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12/5/03 - Frame pics taken back in October. Wooden ribs held in place with aluminum channel. The track rail for the third leg extension has been added, and the linear actuator has been put in place as well.
|
|
|
|
|
Proud Member of The
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
03/10/05 - I replaced the gearmotor that originally came with the linear actuator...it had the right amount of speed, but unfortunately, did not have enough power. I replaced it with this high tourque gearmotor from AM Equipment. It is much slower than I would like (7 seconds to deploy), but it can lift the entire droid(all 150lbs) clear off the ground, and hold it there. I do not think that I will needa locking mechanism, due to the fact that the motor does not move at all without power. I will have to test this to be sure, but I am very happy with this setup so far.
To the left is the J-Rod. This rod tips the main legs back as the middle leg travels down. Nylon rollers attatched to the middle leg act as guides. The curvature determines when the main legs will tilt back, and by how much. I had to make several rods to get the perfect angle. The rod itself is mounted to the main leg axle that connects the legs together.
Limit switches are placed at the top and bottom of the stroke to prevent the center leg from going to far. I am using a power window switch to activate the linear actuator, and a servo connected to that switch allows me to activate the motion with my remote.
|
|
|
|
|
|
|
|
03/08/05 - Here is a pic of Brett Landons beautiful foam core skirt. It is very light, but strong. Thank you Brett...this saved me lots of work!
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
 |
|
 |
|
 |
|
|
|
|
|
|
|
|
03/20/05 - Here is my progress so far, R2 now can transition from two to three-leg mode and back. I am still working on the timing though...he tends to fall forward when the middle leg retracts. This is due to the center of gravity being so far forward. Hopefully I can adjust the leg travel some more, and solve the problem.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
04/08/05 - Here is the layout for my body skins. They were made from Sintra, a foam PVC material. The base is 2mm, and the outer skin is 1mm. Once the measurements were applied to the skin, I carefully cut out the panels using a razor knife and straight edge. Once the panels were cut out, I sanded and glued the pieces in place, using PVC pipe cement. Below is a pic with the aluminum vents and coin slots in place, just to see how it all looks.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|