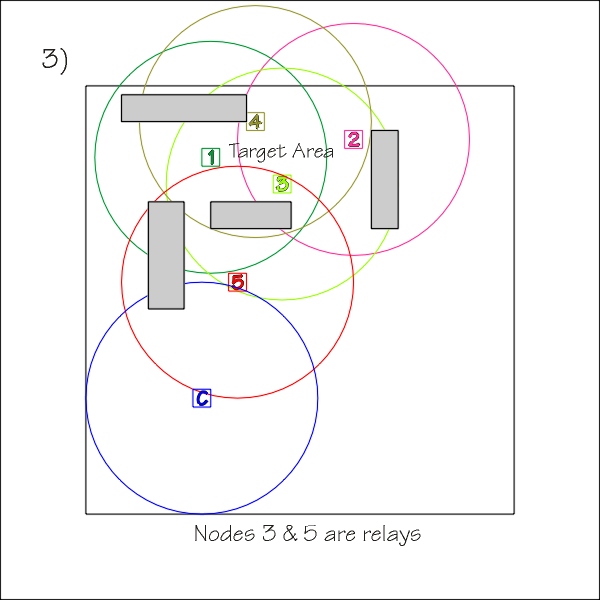
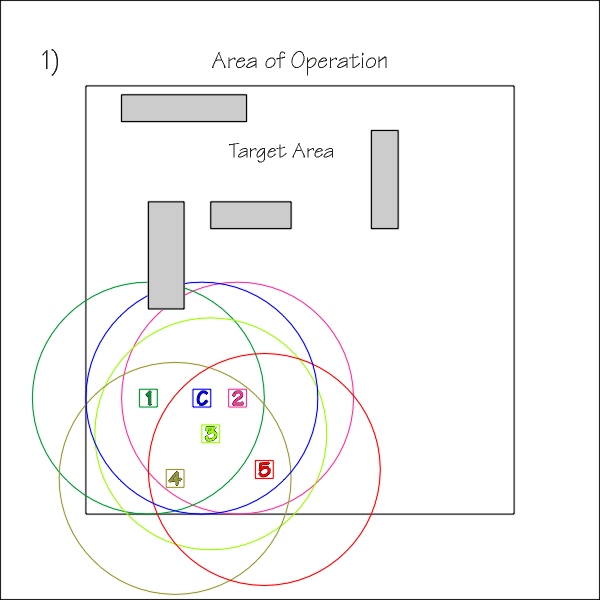
1) The controller issues a command to the swarm to secure the target area. In this case secure means to occupy. All robots are within the network range of the controller.
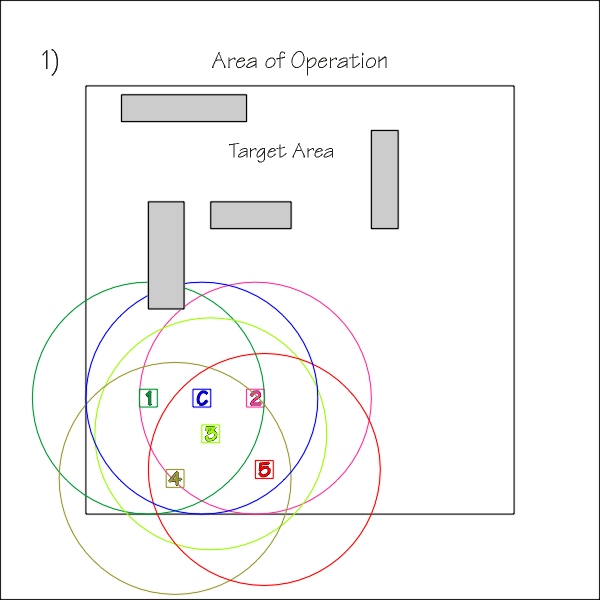
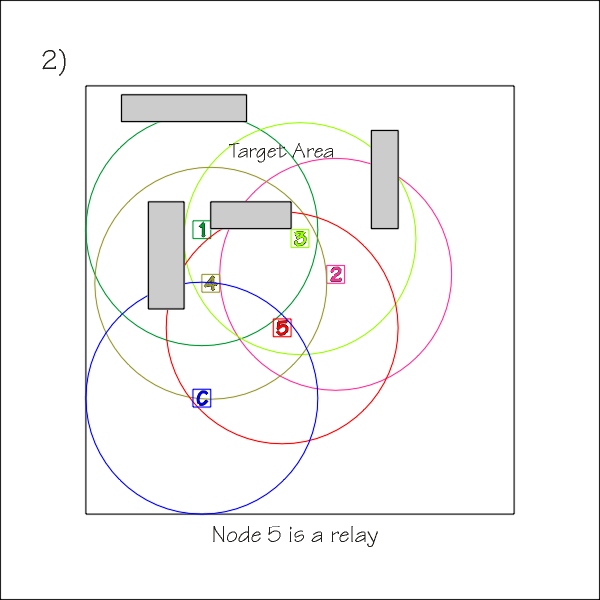
2) As the swarm moves toward the target area, nodes begin to move out of the range of the controller. As this happens the controller commands certain robots to become relay stations. These stations may be moved to maximize distance from the controller.
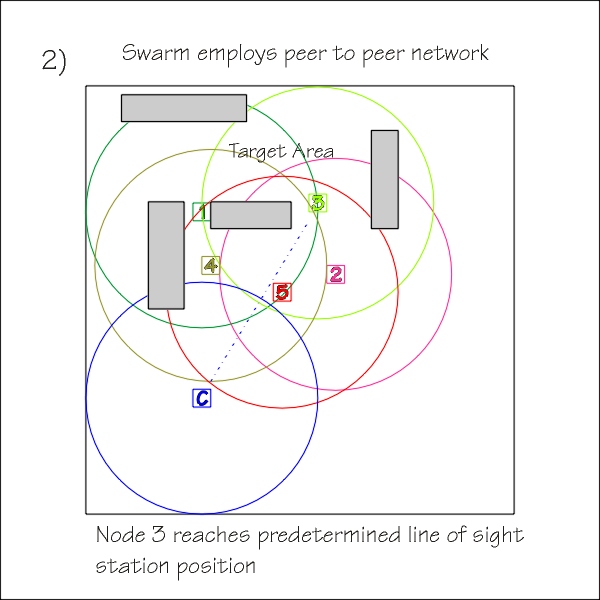
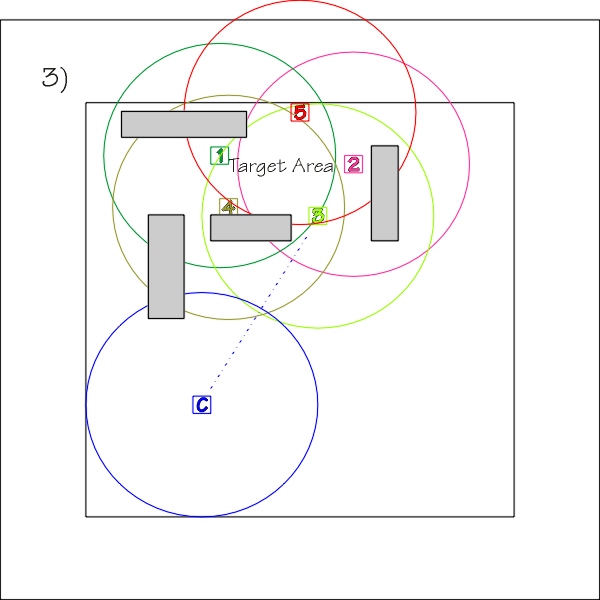
3) As the swarm approaches the target area two nodes are needed as relays to ensure communication with the controller. Three of the five are free to explore the target while two must remain stationary.