Fuzzy Logic Inference Engine for Sensor Fusion
Montana State University Department of Electrical and Computer Engineering
Summer 2003
Advisor: Dr. Robert Gunderson Researcher: Gary Schoep
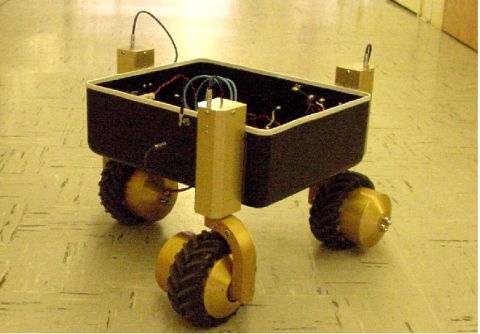
Abstract: Create a Fuzzy Logic system to be used
for sensor fusion on the autonomous T/2, tank over two, wheeled test bed
vehicle. The system must be able to navigate autonomously through
a crowded environment, such as the hallways of buildings on the Montana
State University campus, where safety is a major issue.
The system must:
Circumnavigate a hallway and return close to its point of departure