The T/2 or "T over Two" is the latest in a series of designs started
at the
Center for Self Organizing
and Intelligent Systems
(CSOIS) at Utah State University under the direction of Dr.
Bob Gunderson.
This is the first platform built under Dr. Gunderson since he came
to Montana State University. The vehicle was built by a Victor Kalman,
a 3rd year student (equivalent to a Master's degree student) from Budapest
Technical University. Victor built the T/2 with equivalent parts to
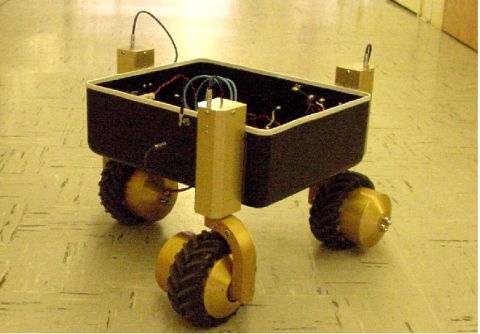
the T1 project. Since the T1 had six wheels and the new robot only
had three wheels, it was dubbed "T divided by two" or T over two for short.
The vehicle is tele-operated, or operated by remote control, from a
tele-operation box that contains movement controls, an LCD display showing
on-vehicle camera video and a small LCD showing system messages.
The significant technology in the Tseries robots is the smart wheel
concept. Developed at CSOIS, the smart wheel is a fully self-contained
drive system. The batteries and drive mechanism are contained in
the wheel hub and are connected to the steering mechanism and interface
electronics with an IR slip ring that allows 360 degree rotation. See
what CSOIS says about the
smart wheel concept
.
The smart wheel is sent an x and y vector giving the direction and
speed the wheel is to travel. Simple and elegant...
Tseries Robots from CSOIS
|
T1
Tardec 1 (T1) was the first CSOIS robot with smart wheels, demonstrating
the mobility of an omnidirectional vehicle. This 100-pound wonder with
its distributed processor architecture was developed at the Center for Self
Organizing and Intelligent Systems (CSOIS) as part of a TARDEC / TACOM funded
mobility study. |

|
T2
The big, bad brother and successor of the T1, the T2 features two
Pentium and six 68332 processors, infinite rotation of the wheels about
the steering axis, and a failsafe brake system. The T2 also came about
in a TARDEC/TACOM funded mobility study.
|
|
T3
Weighing in at only 120 pounds, the T3 features a modular chassis
and distributed processor architecture similar to that used by the T1 and
T2. Its steering motor, spindle, and absolute encoder are coupled by gears
to provide a very compact, lightweight design.
|
|
T4
Part of a cooperative, autonomous surveillance system, T4 is
a midsized mobile robot that surveys a parking area and deploys the smaller
ODIS robot to investigate an unknown or suspicious vehicle.
|
For more information on the Tseries robots refer to the CSOIS
web page
from which this information was gathered.
Last Update: May 09, 2003
Copyright (c) Smart Sensors for Autonomous Robots Design Group,
2003
CSOIS and information on the Tseries robots is copyrighted by Utah
State University