Deliverable
SECTION 1
Introduction
Deliverable
Description
SECTION 2
Block Diagram
Flow Chart
SECTION 3
Specifications
Parts List
SECTION 4
Photo Album
VB Interface
Presentation
(Power Point)
{kind=link}
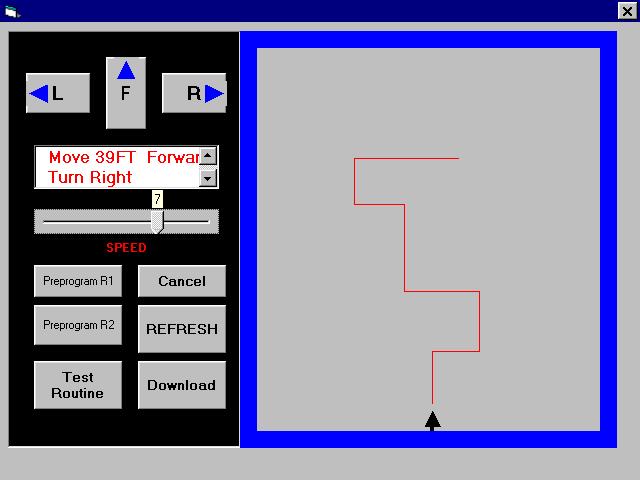
A Semiautonomous robot that
communicates with the user via a visual basic interface. All the
navigational information is entered into a control device on the robot via
a VB interface; this interface creates a file that is downloaded to the
robot via a serial link. The output of the control device controls two D-C
motors. The robot interprets
the information entered and moves form its “home” position to the
location directed by the user and then returns to its home position.
Additionally, the user is able to set the speed of the operation, execute
a test routine to check the functionalities of the robot and view the
proposed path by a graphical representation on the VB screen.
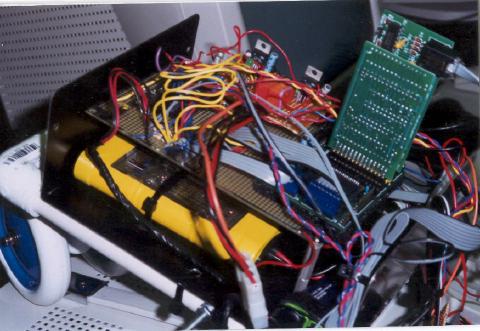
The physical appearance of the robot mimics that of a tricycle, with the rear wheels being used to control movement. Additionally, there is a control panel on the robot; it offers functions that allow the user to initialize the robot during initial start-up of a program…i.e both rear wheels are aligned ( both clocks are at a logic high). This design offers little room for the robot to roam since its movement will be precisely measured. The robot have object avoidance capability (using ultra sonic sensor) and will offer resistance to wheel slippage, this is due to a rubber lining on the rim of each wheel.
Testing Functionalities
Presentation

Testing Functionalities