In order for our robot to move forwards and back, we need to be able to reverse the direction our motor turns. Of course, since we only use DC motors, we can change the direction simply by reversing the contact. But it�s obviously impossible to be chasing after our robot, switching the wires around every time we need to change direction. Also, rules say that no team member can enter the ring during a match. This means, we need a way of controlling the motor remotely.
Frank has developed a highly experimental circuit schematic that he hopes will work (and not kill anybody.) The design of this circuit has come from a website: http://www.penn-bot.bravepages.com/archive.htm
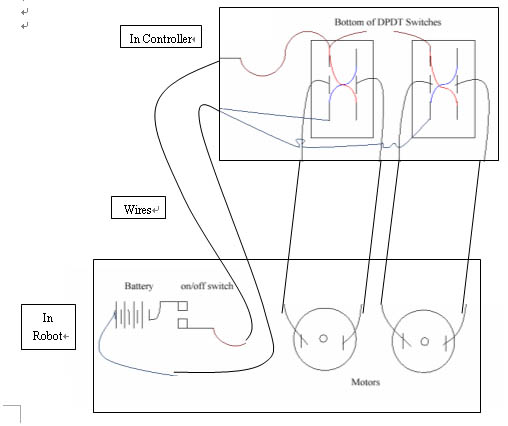
Note that the motors, batteries and the main cutoff switch are located inside the robot. All NITRO robots (especially ones with cutting blades) must be equipped with a main cutoff switch.
This circuit completely eliminates the need for using transistor H-bridges. If you look at the switches carefully, you will see that all the necessary connections are made at the correct times. Shown below is the circuit that utilizes Double-Pull Double-Throw switches, used to control two motors. You can add more of these switches in series to the same battery pack, or you can add a complete new set.