|
For my undergraduate research, I constructed a coach agent equipped with the global vision system to assist a team of 2 robots to acquire team play in a game of robotic soccer for the RoboCup Project. In this project proposed by Prof. Asada et.al, we are using robots to play the game of soccer, and the aim by year 2050 is to develop a group of humanoids that can beat the human team at that time!
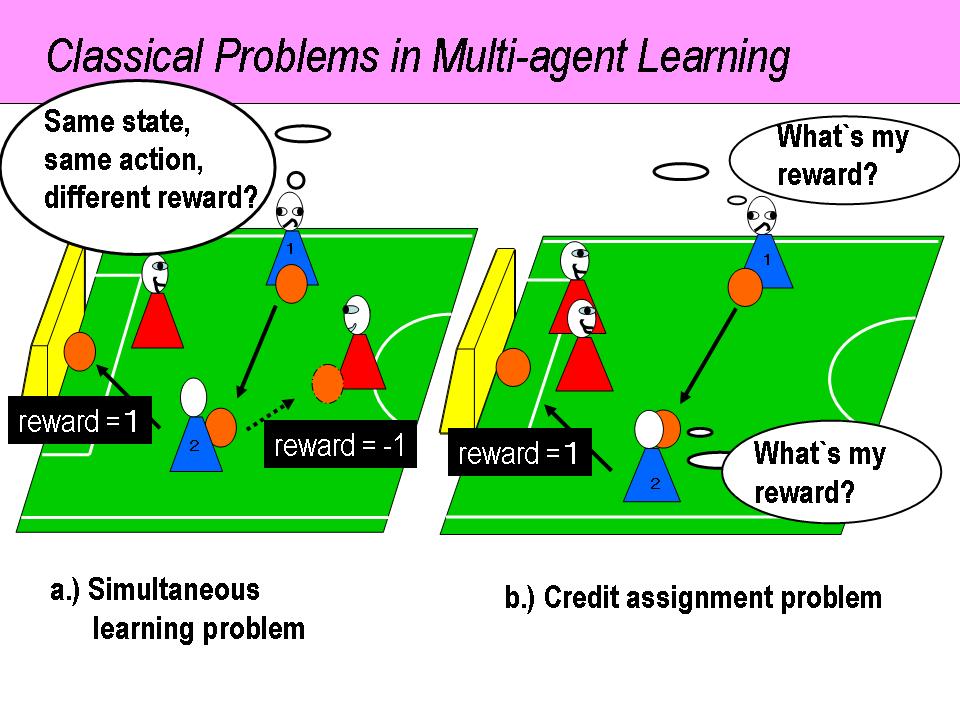
In soccer, team play or cooperative behaviour is relatively important and to achieve this behaviour, learning is required. However for robots, multi-agent environment learning is difficult due to some classical problems shown above. For example, in (a), team-mate 1 is confused by the reward given to the team when it is at the same state performing the same action, but leading to different results and in (b) when a combination of a pass and a shoot produces a goal, a problem rises in assigning reward to the team members. |
|
|
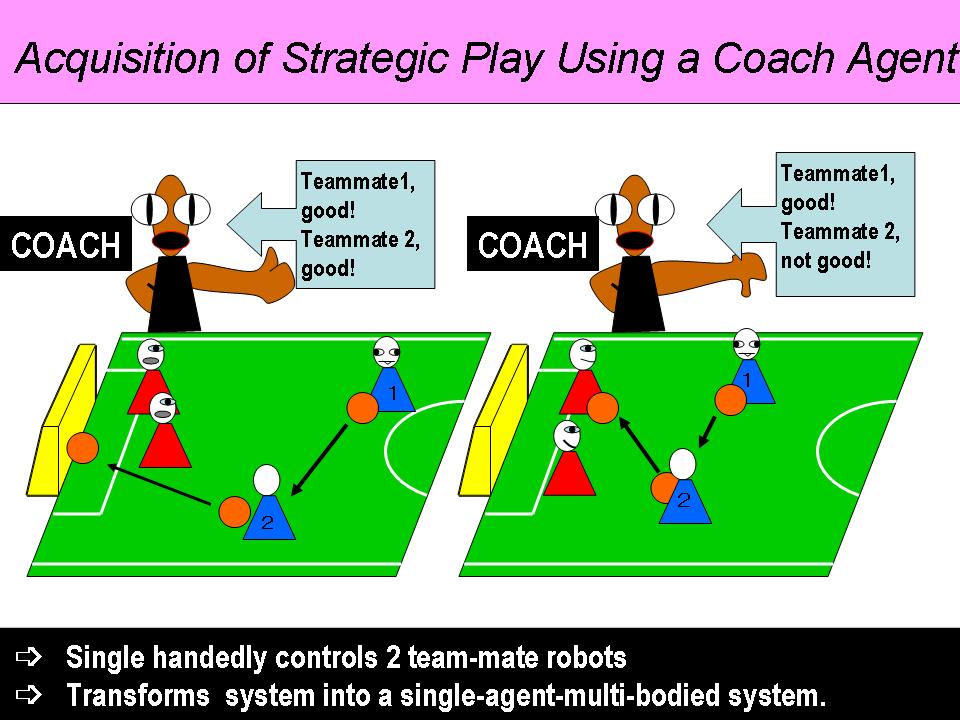
If we have a single agent that can represent the whole team in the obtaining of reward, such problems can be solved. Therefore, we introduce a coach agent, which commands the blue team, assisting them to perform actions that benefit the entire team. This coach agent is equipped with the global vision system that obtains information of every object on the field, and with these information, strategic team play is acquired through effective commands given by the coach. |
|