| Masters Course Research: The Shape Memory Alloy (SMA) |
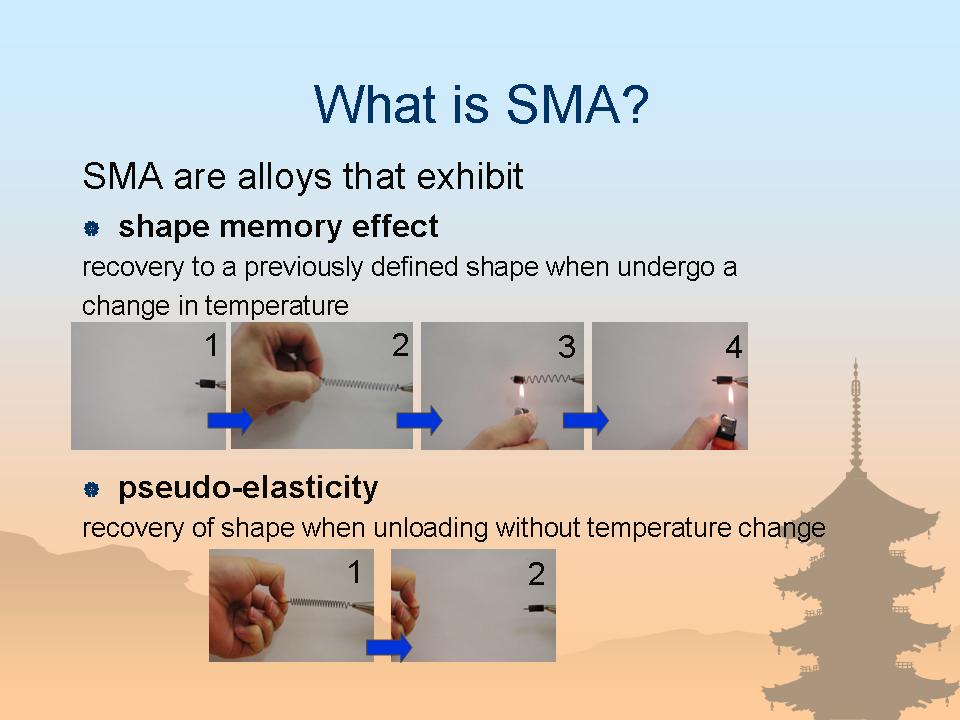
| At the University of Tokyo, I was researching into the shape memory alloy (SMA). In 2004, I participated in the IWMMS 2004 (Kyoto), and in the middle of 2005, IROS 2005 (Edmonton) and also the EMBC 2005 (Shanghai) , and early of 2006, IAS-9 2006 (Tokyo). I learnt alot about what research is about, and I found new excitements in developing science as a tool to help mankind achieve better quality of life. Please click on the links below to view the photos of the conferences. IWMMS 2004: Man-Machine Symbiotic Systems Workshop IROS 2005: Intelligent Robots and Systems EMBC 2005: Engineering in Medicine and Biology IAS-9 2006: Intelligent Autonomous Systems What is SMA? SMA or shape memory alloys are alloys that exhibit both the shape memory effect and the super-elasticity. The shape memory effect involves temperature change in the phase change. When it is at low temperature, the SMA mostly remains in the form of crystalline structure of martensite, which displays an elastic nature. When heated, the crystalline structure transforms to the austenite structure which is less elastic, thus strain induced to the SMA at the lower temperature martensite phase can be recovered in the austenite phase. The super-elasticity on the other hand, is an effect where, phase change from martensite to austenite occurs without the change in temperature but rather in the increase of load. At present, super-elasticity of the SMA is widely used in spectacle frames, brassieres, corrective braces and cell-phone antennas. |
 |
| Challenges Although SMAs are known to have many advantages such as high recovery forces, silent in operation, bio-compatible et.cetera, one main disadvantage is its relatively slow control response speed. A low response speed of the SMA actuator results in limited application of the alloy in fields that require fast actuation. Therefore the purpose of my research is to maintain the simplicity of the SMA actuator and increase the response speed of the actuator. To investigate the response of SMA when subjected to heating, two experimental conditions are setup to for the purpose. In the first setup, a SMA wire of 0.3mm in diameter and length 0.6m is used as an actuator to haul up a weight of 3kg periodically. In the second setup, the SMA wire of length 0.8m is used as an actuator on a horizontal plane, pulling a spring in a periodic manner. During actuation, the strain of the SMA, its temperature increase and amount of current are detected by sensors and fedback to the computer via a 12bit PC card. (See Fig.1 and 2) |
| Hardware and Experiment Setup |
| Back to home |
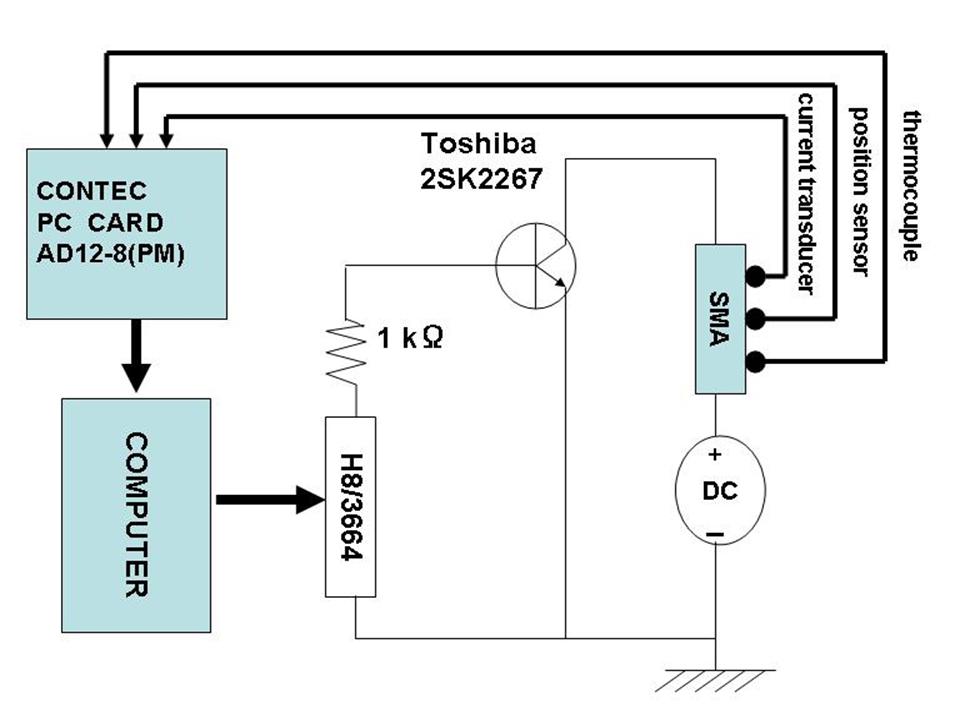 |
| Fig.1 Circuitory of experiment |