RFID คือระบบชี้เฉพาะอัตโนมัติ (Automatic
Identification) แบบไร้สาย (wireless)
เช่นเดียวระบบ barcode แต่ใช้ความถี่วิทยุ
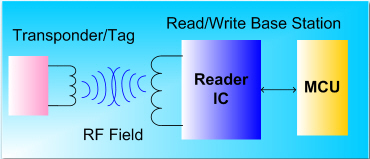
ในการติดต่อสื่อสาร ระบบนี้จะประกอบด้วยอุปกรณ์สองส่วน คือ Reader
และ Tags โดยการทำงานนั้นเครื่องอ่านจะทำหน้าที่จ่ายกำลังงานในรูปคลื่นความถี่วิทยุให้กับ
Tags เพื่อให้ Tags
ส่งรหัสชี้เฉพาะ กลับมา ข้อดีของระบบ RFID คือเป็นระบบไร้สายจึงไม่จำเป็นต้องนำ
Tag ไปสัมผัสกับเครื่องอ่านซึ่งช่วยเพิ่มความสะดวกและเป็นอัตโนมัติให้กับระบบชี้เฉพาะ
โดยระบบ RFID สามารถนำไปประยุกต์ใช้งานได้อย่างกว้างขวาง
เช่น การใช้บอกรหัสสินค้า การใช้บอกรหัสประจำตัวพนักงาน หรือการใช้งานควบคุมการเข้าออกเป็นต้น
(อ่านรายละเอียดเพิ่มเติมได้ที่ "
RFID คืออะไร
")
โครงการพัฒนาเครื่องอ่าน
RFID ระยะที่สอง
(2548-47) 
คณะวิจัย
- นายวัชรากร หนูทอง
- นายอนุกูล น้อยไม้
- เจนวิทย์ ศรีหารักษา
- อภิรดี ยอดเทียน
 โครงการย่อยพัฒนาต้นแบบไมโครชิพหน่วยประเมินผลด้านดิจิตอลแบบหลายมาตรฐานที่ใช้ในเครื่องอ่าน
RFID ย่านความถี่ต่ำ
โครงการย่อยพัฒนาต้นแบบไมโครชิพหน่วยประเมินผลด้านดิจิตอลแบบหลายมาตรฐานที่ใช้ในเครื่องอ่าน
RFID ย่านความถี่ต่ำ

คุณสมบัติ
- พัฒนาด้วยเทคโนโลยี AMS CMOS 0.35 um
3.3V
- สามารถอ่านบัตรแบบ Proximity และ Animal tag ได้
- สามารถโปรแกรม Bitrate และจำนวน Maximum block data ได้
- สามารถเชื่อมต่อกับคอมพิวเตอร์ทางพอร์ตอนุกรม
- กินกำลังไฟต่ำ สามารถนำไปประยุกต์ใช้งานในเครื่องอ่านแบบพกพาได้ (Handheld)
โครงการย่อยพัฒนาต้นแบบเครื่องอ่านฉลากเพื่อคนตาบอดและผู้สูงอายุ
หลักการ
เป็นการประยุกต์ใช้งานเทคโนโลยี RFID ในด้านสาธารณสุขโดยการติด RFID
ร่วมกับฉลากยา ให้กลายเป็น Smart Labelโดยรายละเอียดเกี่ยวกับยาแต่ละชนิดนั้นถูกบันทึกไว้ในเครื่องอ่านซึ่งมีขนาดเล็กกินไฟน้อยสามารถแสดงผลออกมาเป็นเสียงตามรายละเอียดของยาที่บันทึกไว้
การใช้งาน
เมื่อนำขวดยาที่ติดฉลาก RFID Label มาอยู่ในระยะที่เครื่องอ่านสามารถจะอ่านได้
เครื่องอ่านจะเปรียบเทียบหมายเลขฉลากเทียบกับข้อมูลในเครื่องอ่าน แล้วจะแสดงผลเป็นเสียงตามรายละเอียดที่ได้บันทึกไว้
ส่วนประกอบ
- EM4095 เป็น IC รับส่งและถอดรหัสสัญญาณ RFID เพื่อติดต่อกันระหว่าง
RFID Tag และ Microcontroller
- T5557 เป็น IC รับสัญญาณ และตอบกลับสัญญาณ กลับไปให้ EM4095 โดยจะติดอยู่บน
Tag สามารถทำงานได้โดยไม่ต้องใช้ไฟฟ้า
- AT89S8252 เป็น Microcontroller ทำให้ที่ควบคุมการทำงานของทั้งระบบ
- ISD4003 เป็น IC บันทึกเสียงขนาด 4 นาที ทำหน้าที่บันทึกเสียงรายละเอียดของ
Tag แต่ละตัว
<สามารถเพิ่มได้สูงสุดเป็น 16 นาที >
- 7 Segment ทำหน้าที่แสดงลำดับของแต่ละ Tag
คุณสมบัติ
สามารถตรวจสอบฉลากยาที่ติดตั้ง Tag RFID ไว้ภายใน สามารถแสดงผลด้วย 7-Segment
และเปล่งเสียงบอกรายละเอียดเกี่ยวกับยาชนิดนั้นๆ ตามที่ได้บันทึกไว้
โดยสามารถบันทึกเสียงประจำรหัสบัตรได้ทั้งหมด 40 ช่อง รองรับจำนวนยาทั้งหมด
40 ชนิดโดยแต่ละช่องมีความยาวประมาณ 5 วินาที

โครงการออกแบบเครื่องอ่าน
RFID สำหรับงานควบคุมการเข้าออก
(2547-46)
คณะวิจัย
- นายวัชรากร หนูทอง
- นายอนุกูล น้อยไม้
บทคัดย่อ
การออกแบบต้นแบบเครื่องอ่าน
RFID (Radio Frequency Identification) ย่านความถี่ 125 KHz เพื่อใช้งานประเภทควบคุมการเข้าออกสำนักงานต่างๆ
โดยมีจุดประสงค์เพื่อทดแทนการนำเข้าเครื่องอ่าน RFID ราคาแพงจากต่างประเทศ
โดยเครื่องอ่านที่จะออกแบบจะต้องสามารถอ่านและเขียนบัตร RFID มาตรฐานทั่วไปได้
มีหน่วยแสดงผลแบบ LCD ขนาด 2 บรรทัด มีหน่วยความจำอีอีพรอม8 กิโลไบต์สำหรับบันทึกข้อมูลการใช้งาน
และสามารถเชื่อมต่อกับคอมพิวเตอร์ผ่านพอร์ต RS-232 ได้
ผลงานวิจัย
ต้นแบบเครื่องอ่าน RFID สำหรับควบคุมการเข้า-ออก
(RFID Reader v 2.0)

คุณสมบัติ
- AT89S52/53/8252/8253 MCU
- External 8-KByte EEPROM
- EM4095 Front-end chip
- Powered via switching regulator (LM2575)
- Programmable 6-bit ID
- Power supply and data interface thru RJ45 connector
- Data interface via RS422 protocol
- Real-Time Clock
- LCD display
- 1 on-board switch and 1 external 4x4 matrix switch
- 1 buzzer
- 2 external TTL input
- 3 external TTL output
- 3 external LED
- In-System Programming
- PCB size: 4.5 in. x 5.5 in.
Technologies
Performance Characteristics
Frequency: LF band, 134.2/125 KHz
Supported Transponders: Temic-e5550, e5551, SiC77xxx and ISO tags
Communications: RS-232/422/485
Read distances: 5-8 cm
Antenna Type: Inductance: 660 uH, Q: 30-50 at 125 KHz
Upgradeable Firmware: Yes
Physical Characteristics
Models: OEM134TD-Reader-v2
Dimensions (L x W x D): 12.7 x 14.5 x 4.0 cm
Weight: 640 g
Environment
Operating temperature: 0C to +70C
Power:
- Input voltage: +9VDC
- Active current: 150 mA (typ), antenna dependent
- Standby current: < 100 mA (typ)
- Output power: 120 mW (typ)
โครงการพัฒนาเทคโนโลยี RFID ระยะที่สอง
(2546-45)
คณะวิจัย
- นายวัชรากร หนูทอง
- นายอนุกูล น้อยไม้
ความเป็นมาและเหตุผล (Background
and Rationale)
เนื่องจากในปีพ.ศ. 2545 TIDI/RDE-2 ได้พัฒนาระบบ RFID
(Radio Frequency IDentification)
ทั้งระบบขึ้นสำเร็จ ในรูปแบบของ ชิพต้นแบบ (Prototype chip) และเครื่องอ่านต้นแบบ
(Prototype reader) ซึ่งชิพและเครื่องอ่านต้นแบบสามารถทำงานได้อย่างถูกต้องและมีประสิทธิภาพ
โดยมีคุณสมบัติต่างๆ ดังนี้ดังนั้นในปี พ.ศ. 2546 ทาง TIDI/RDE-2 จึงมีแนวทางการพัฒนาโครงการดังกล่าว
ให้สามารถนำไปประยุกต์ใช้งานได้จริง 2 แนวทางได้แก่
1. โครงการ ไมโครชิพฝังสุนัข
(Animal ID chip)
โครงการไมโครชิพฝังสุนัขเป็นโครงการของกรุงเทพมหานคร
มีนโยบายจะทำการฝังไมโครชิพกับสุนัขบ้านและสุนัขจรจัด ในแต่ละเขตของกรุงเทพมหานคร
ซึ่งเทคโนโลยีพื้นฐานของโครงการ RFID ที่ TIDI ได้วิจัยและออกแบบไว้ใกล้เคียงกันมาก
เพียงรายละเอียดย่อยเท่านั้นที่ต้องปรับเปลี่ยนให้เข้ากับมาตรฐาน ISO
11784-85 ซึ่งเป็นมาตรฐานของAnimal Identification โดยโครงการนี้สามารถทดแทนการนำเข้าของชิพจากต่างประเทศได้ทันที
วัตถุประสงค์ของโครงการ
1. เพื่อพัฒนาต้นแบบเดิมให้สามารถนำไปประยุกต์ใช้ในโครงการไมโครชิพฝังสุนัข
ซึ่งมี ISO 11784-85เป็นมาตรฐานของ Animal Identification โดยอาศัยสถาปัตยกรรมเดิมที่ออกแบบไว้
แต่เปลี่ยนย่านความถี่ที่ใช้งานไปเป็นย่านความถี่ 134.2 kHz ตามมาตรฐานการออกแบบและโค้ดดิ่งและการ
Verification และการจัดรูปแบบการเก็บข้อมูลให้ตรงกับมาตรฐานที่กำหนด
ดังรายละเอียดข้างล่าง
2. เพื่อพัฒนาให้สามารถอ่านและเขียนข้อมูลได้ทางอากาศ โดยจะออกแบบที่เทคโนโลยี
0.35 ไมครอน โดยใช้ EEPROM ในการจัดเก็บข้อมูล ID ภายในชิพ
3. เพื่อพัฒนารูปทรงให้มีขนาดเล็กที่จะสามารถฝังลงในผิวหนังของสัตว์ได้
ซึ่งในการออกแบบเดิมสายอากาศจะใช้เป็นขดลวดเหนี่ยวนำ ซึ่งมีขนาดใหญ่
จึงจำเป็นต้องเปลี่ยนมาใช้ Ferrite coil แทนเพราะมีขนาดเล็ก
2. โครงการบัตรประชาชนสมาร์ทการ์ด
(E-Citizen)
โครงการบัตรประชาชนสมาร์ทการ์ดเป็นโครงการที่รัฐบาลมุ่งเน้นให้ประชาชนเข้าสู่ระบบการใช้บัตรสมาร์ทการ์ดแทนบัตรประจำตัวประชาชน
ซึ่งบัตรดังกล่าวเป็นบัตรอิล์กทรอนิกส์มีชิพคอมพิวเตอร์ขนาดเล็กฝังอยู่
เพื่อทำหน้าที่บันทึกข้อมูล ซึ่งเป็นโครงการขนาดใหญ่ ถ้าเราสามารถทำต้นแบบและผลิตเองภายในประเทศก็จะทำให้ประหยัดงบประมาณได้มาก
ซึ่ง TIDI เล็งเห็นความสำคัญนี้ จึงจะได้ทำการพัฒนาต่อยอดของโครงการพัฒนาเทคโนโลยี
RFID ไปสู่ Contactless smartcard ที่สามารถนำไปประยุกต์ใช้ในโครงการ
E-Citizen ได้ในอนาคต
ผลงานวิจัย
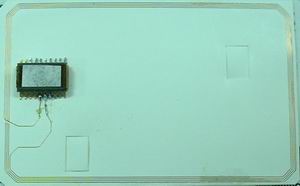
ต้นแบบเครื่องอ่าน RFID ตามมาตรฐาน ISO 11784/85
(ใช้ในงานปศุสัตว์)


คุณสมบัติ
- สามารถอ่านบัตรหรือไมโครชิพตามมาตรฐาน
ISO 11784/85
- ระยะอ่านประมาณ 4-6 cm
- เชื่อมต่อกับคอมพิวเตอร์ทางพอร์ตอนุกรม
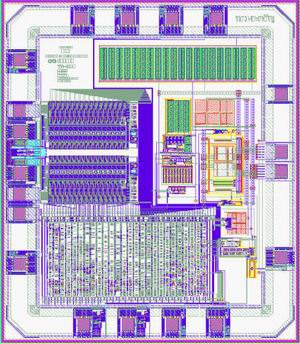
ต้นแบบหน่วยประเมินผลด้านดิจิตอลของไมโครชิพตามมาตรฐาน
ISO 11784/85 ในรูปแบบ VHDL
 ่
่
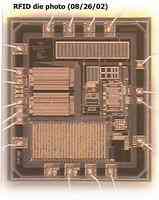
ภาพตัวอย่างของไมโครชิพที่ใช้ในปศุสัตว์
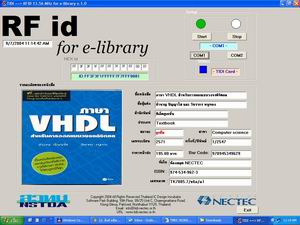
โครงการออกแบบไมโครชิพ
RFID ย่านความถี่ 13.56 MHz
(2545-44)
ความเป็นมาและเหตุผล
ในปัจจุบัน
การใช้บัตรอัจฉริยะ (SmartCard) และระบบตรวจสอบรหัสโดยใช้ความถี่วิทยุ
(RFID)
เป็นที่ยอมรับอย่างสูงว่าเป็นเทคโนโลยีที่เอื้ออำนวยต่อการใช้งานที่ต้องการการบ่งบอกความแตกต่างหรือข้อมูลจำเพาะของแต่ละบุคคล
ที่สามารถทำงานได้ถูกต้องแม่นยำ รวดเร็ว และมีความเป็นอัตโนมัติกว่าระบบตรวจสอบรหัสในระบบอื่นๆ
เช่น รหัสแบบแท่ง (Barcode) การใช้งานที่ง่ายและยังเพิ่มขีดความสามารถในการให้บริการเสริมในเชิงพาณิชย์ด้านต่างๆ
อีกทั้งยังสอดคล้องกับเทคโนโลยีทางการเก็บข้อมูลคอมพิวเตอร์ ยังผลให้การขยายตัวของการใช้งาน
RFID/SmartCard สูงขึ้นอย่างก้าวกระโดด
วัตถุประสงค์ของโครงการ
โครงการ RFID เป็นโครงการพัฒนาผลิตภัณฑ์วงจรรวมชิปเดี่ยวเพื่อใช้ในบัตรอัจฉริยะ
(SmartCard Chip) ชนิดไร้สัมผัส (Contactless) เพื่อสร้างต้นแบบให้กับผู้ประกอบการ
RFID/SmartCard ในประเทศไทยนำไปพัฒนาต่อในเชิงพาณิชย์เป็นการยกระดับขีดความสามารถในการพัฒนาออกแบบและผลิตอุปกรณ์ด้านวงจรรวมและสนับสนุนให้เกิดผลผลิต
ทางการออกแบบวงจรรวมของสถาบันวิจัยในประเทศซึ่งเป็นฐานสำหรับการพัฒนาบุคลากรทางด้านไมโครอิเล็กทรอนิกส์ชั้นสูง
ทั้งยังสร้างมูลค่าเพิ่มอย่างมากให้กับผลิตภัณฑ์อุตสาหกรรม เครื่องใช้ไฟฟ้าและอิเล็กทรอนิกส์
การประยุกต์ใช้งาน
- ระบบการบอกรหัสสัตว์เลี้ยง (Animal identification)
- ระบบทะเบียนประวัติ บัตรประชาชน (e-Citizen)
- ระบบข้อมูลประวัติการรักษาพยาบาล (Health Care)
- ระบบตั๋วอิเล็กทรอนิกส์ (e-Ticket)
- ระบบบัญชีรายการอัตโนมัติ (Automated Inventory)
- ระบบบอกรหัสพนักงาน (Automatic Teller)
- ระบบอนุณาติเข้าออกสำนักงาน (Security Access)
คณะวิจัย
- นายมานพ ธรรมสิริอนันต์ TIDI บริหารโครงการ, Design Integration
- นายอภิศักดิ์ วรพิเชฐ TIDI Analog design, RF front end
- นายวัชรากร หนูทอง RDE2 Digital design
- นายชำนาญ ปัญญาใส RDE2 Technical Coordinator / Fab Contact
- นายณพงษ์ ปณิธานธรรม TIDI Analog design
- นาย ชรัณ มีนกาญจน์* RDE2 Hardware design
- น.ส.อภิรดี ยอดเทียน* RDE2 Layout Design
ผลการวิจัย
คุณสมบัติเบื้องต้นของไมโครชิป
RFID
- เป็นระบบชี้เฉพาะด้วยความถี่วิทยุบนชิพเดียว
- เป็นระบบไร้สัมผัส (Contactless) ในย่านความถี่ 13.56 MHz
- มีหน่วยความจำพรอมอนุกรมแบบโปรแกรมได้ครั้งเดียวขนาด 64 บิต
- ใช้การเข้ารหัสข้อมูลแบบอินเวอร์สแมนเชสเตอร์ขนาด 70 กิโลบิตต่อวินาที
- มีระบบป้องกันการชนกันของข้อมูล (Anti-Collision Feature)
- รูปแบบของการจัดเก็บข้อมูล IDขนาด 64 บิตตามมาตรฐาน ISO 11784
- ขนาดได (Die) 2,270 x 2,620 ตารางไมครอน
- ใช้ศักดาไฟฟ้า 3.3 โวลต์ กินกำลังไฟ 140 ไมโครวัตต์
- ออกแบบโดยใช้เทคโนโลยีซีมอส 0.8 ไมครอน
- ใช้แพลตฟอร์มออกแบบ Cadence EDA
-
ต้นแบบหน่วยประเมินผลด้านดิจิตอลของชิป RFID
บน FPGA technology
ระบบ
GPS หรือระบบบอกพิกัดบนโลกโดยการอ้างอิงจากดาวเทียมระบบนี้เป็นระบบที่มีการคิดค้นขึ้นมาโดย
กระทรวงกลาโหมของประเทศสหรัฐอเมริกา (U.S. Department of Defense,
DOD) เริ่มแรกระบบ
GPS เป็นระบบที่ออกแบบเพื่อใช้ในการทหารเท่านั้น
แต่ปัจจุบันนี้ระบบนี้ได้เปิดกว้างให้บุคคลทั่วไปสามารถใช้งานได้
การบอกพิกัดของระบบ GPS
จะต้องมีอุปกรณ์ที่เรียกว่า GPS Receiver ทำหน้าที่รับสัญญาณจากดาวเทียม
แล้วนำสัญญาณดังกล่าวมาประมวลผลเพื่อหาพิกัดปัจจุบันของผู้ใช้ว่ากำลังอยู่ที่ตำแหน่งใดบนโลกสัญญาณดาวเทียม
ที่ใช้ในการประมวลผลเพื่อหาพิกัดจะต้องเป็นสัญญาณที่รับจากดาวเทียมอย่างน้อย
4 ดวงซึ่งอยู่ในระนาบสามมิติ
(อ่านรายละเอียดเพิ่มเติมได้ที่ " GPS
คืออะไร ")
โครงการพัฒนาเทคโนโลยีจีพีเอส
(2544-42)
บทคัดย่อ
โครงการวิจัยและพัฒนานี้มีจุดมุ่งหมายที่จะพัฒนาเทคโนโลยีจีพีเอส
(GPS: Global Positioning System) ซึ่งเป็นระบบดาวเทียมบอกพิกัดตำแหน่งบนพื้นโลก
ที่มีความเที่ยงตรงสูง และกำลังได้รับความนิยมในการงานอย่างกว้างขวางในด้านต่างๆ
เช่น การนำร่อง การเดินทาง การจราจร เป็นต้น
โครงการวิจัยนี้มีจุดมุ่งหมายที่จะออกแบบและสร้างระบบต้นแบบจีพีเอสที่สามารถบอกตำแหน่งพิกัดได้อย่างถูกต้องขนาด
12 ช่องสัญญาณ โดยจะทำการออกแบบชิพวงจรวมต้นแบบโดยใช้ภาษาวีเอชดีแอล (VHDL)
ในการบรรยายพฤติกรรม จำลองการทำงาน (Simulation) และใช้โปรแกรมช่วยสังเคราะห์
(EDA: Electronics Design Automation) ทำการสังเคราะห์ (Synthesize) และนำไปทดสอบการทำงานด้วยอุปกรณ์เอฟพีจีเอ
(FPGA: Field Programmable Gate Array) บนบอร์ดทดสอบต้นแบบที่พัฒนาขึ้น
ในการบอกพิกัดตำแหน่งต่อไป
คณะผู้วิจัย
- นายชำนาญ ปัญญาใส เนคเทค หัวหน้าโครงการ
- ดร. สวัสดิ์ ตันติพันธุ์วดี RBD,Orbital Science ผู้เชี่ยวชาญพิเศษ
- นายชรัณ มีนกาญจน์ เนคเทค
- นายเจนวิทย์ ศรีหารักษา เนคเทค
- นายวัชรากร หนูทอง เนคเทค
- นายสุธา อาภานุพงศ์ เนคเทค
หลักการทำงาน
หลักการพื้นฐานของระบบ GPS เป็นเรื่องง่าย ๆ แต่อุปกรณ์ของเครื่องมือถูกสร้างขึ้นด้วยวิทยาการขั้นสูง
การทำงาน GPS แบ่งออกได้เป็น 5 ขั้นตอนคือ
1. การรับสัญญาณจากดาวเทียมโดยหลักการรูปสามเหลี่ยมระหว่างดาวเทียมกับเครื่องรับ
GPS วัดระยะโดยใช้เวลาเดินทางของคลื่นวิทยุ
2. ในดาวเทียมและเครื่องรับจำเป็นจะต้องมีนาฬิกาที่ละเอียดสูงมาก
3. นอกจากระยะทางแล้วจะต้องทราบตำแหน่งของดาวเทียมที่อยู่ในอวกาศด้วย
4. การชดเชยค่าความล่าช้าของสัญญาณในการเดินทางผ่านชั้นบรรยากาศไอโอโนสเฟียร์
(Ionosphere) และชั้นบรรยากาศโลก (Atmosphere)
เครื่องรับสัญญาณจีพีเอส (GPS
RECEIVERS)
เป็นอุปกรณ์ที่ใช้ในการประมวลผลสัญญาณดาวเทียมเพื่อใช้ในการบอกพิกัด
โดยตัว GPS Receivers สามารถแบ่งออกได้เป็น 3 ส่วนหลักคือ
- RF Module เป็นส่วนที่ทำหน้าที่ในการรับสัญญาณดาวเทียมนำสัญญาณดาวเทียมที่รับเข้ามาผ่านกระบวนการต่างๆ
เช่น Downconversion, Filtering, Sampling และ Analog to Digital Conversion
สัญญาณ Analog ที่รับจากดาวเทียมเมื่อผ่านส่วนนี้ไปแล้วได้เป็นสัญญาณดิจิตอล
เพื่อใช้ในการประมวลผลในส่วนต่อไป
- GPS Chip ทำหน้าที่ในการติดตามสัญญาณที่ได้จาก
RF Module เพื่อใช้ในการประมวลผลหาพิกัด
- Microprocessor ทำหน้าที่ในการประมวลผลหาพิกัด
โดยการคำนวณจะใช้ Digital Signal Processing Algorithm เข้าช่วย และมีการใช้ข้อมูลที่ได้จาก
GPS Chip ร่วมในการคำนวณด้วย
GPS CHIP
GPS Chip คือ อุปกรณ์ที่ทำหน้าที่ในการค้นหาและตรวจจับ
(Acquisition and Tracking) สัญญาณ GPS Satellite Signals ที่มีการเข้ารหัสแบบ
C/A Code จากดาวเทียม NAVSTAR GPS Satellites ได้สูงถึง 12 สัญญาณพร้อมกัน
โดยที่สัญญาณดังกล่าวผ่านการ Down Frequency Conversion และ A/D Conversion
ภายในอุปกรณ์ RF Front End
GPS Chip ทำการค้นหาและตรวจจับสัญญาณจากดาวเทียมแต่ละดวงซึ่งจะต้องอาศัยการประมวลผลของ
ไมโครโปรเซสเซอร์ ในการคำนวณ Digital Signal Processing Algorithm ต่างๆ
ซึ่ง Digital Correlator ตัวนี้สามารถเลือกใช้ได้กับ ARM60 32-bit RISC
Processor ของ Mitel Semiconductor หรือ 32-bit RISC processor ของ Motorola
คุณสมบัติและลักษณะ (FEATURES) ของ GPS
CHIP
- 12 Parallel Tracking Channels
- On-chip Dual UART (Full Duplex) and Real Time Clock
- Compatible with ARM60 32-bit RISC Processor and Motorola 32-bit RISC
Processor
- Low Voltage, Power Management Mode
- Compatible with GP2010 and GP2015 RF Front Ends
- Full In-phase and Quadrature Outputs for Prompt and Early-Minus-Late
Correlators
โครงสร้างของ GPS Chip ประกอบด้วย 12 Channel Correlator, Microprocessor
Interface, Clock Generator และ Peripheral Components (Power & Reset
Control, Dual UART และ Real Time Clock)

GPS chip block diagram
ผลการออกแบบ GPS
chip ในส่วนของ 12-Channel Digital Correlator
จากการจำลองการทำงานโดยใช้โปรแกรม ModelSim
ในการจำลองการทำงานของโมเดลที่ทำการออกแบบแต่ละโมดูล โดยใช้ความถี่ของการ
Sampling ที่ 5.714 MHz พบว่าการทำงานในระดับฟังก์ชันถูกต้องตามการออกแบบไว้ข้างต้น
และได้ทดลองทำการสังเคราะห์ให้อยู่ในรูปของ Gate level โดยใช้เทคโนโลยี
XILINX เอฟพีจีเอตระกูล XC4000 เบอร์ XC4062XLA-09-HQ160 และนำไปโปรแกรมลงชิพเอฟพีจีเอโดยใช้โปรแกรม
Xilinx Foundation series 2.1i ในการ Place & Route ได้ผลดังนี้
- Number of CLBs 337 out of 2304 14%
- Total Latches: 11 out of 4608 1%
- Total CLB Flops: 361 out of 4608 7%
- 4 input LUTs: 531 out of 4608 11%
- 3 input LUTs: 233 out of 2304 10%
- Number of BUFGLSs: 3 out of 8 37%
โดยความเร็วที่สามารถทำงานได้ประมาณ 19.64 MHz (เฉพาะส่วนของ Digital correlator)

12-Channel Digital Corelator emulator
board
เครื่องรับจีพีเอสต้นแบบ
(GPS RECEIVER PROTOTYPE)
เครื่องรับจีพีเอสต้นแบบได้พัฒนาขึ้นโดยใช้ข้อมูลจากชุดพัฒนา GPS Architect
ของบริษัท Mitel Semiconductor (ปัจจุบันเปลี่ยนเป็น Zarlink Semiconductor)
ภายในเครื่องรับจีพีเอสต้นแบบประกอบด้วยส่วนประกอบหลักๆ คือ GPS Active
Antenna, GPS RF Front End (GP2015), 12-Channel GPS Correlator (GP2021),
DW9255 filter, ARM Microprocessor (P60ARM-B), หน่วยความจำ, และ RS232
communication module

GPS development board
Tracking
Algorithm
ในขั้นตอนการพัฒนาเครื่องรับจีพีเอสต้นแบบนี้ได้นำ Tracking Algorithm
ของชุดพัฒนา GPS Architect [1], [4] ซึ่งเป็น Source code ภาษา C รายละเอียดของ
Tracking Algorithm ดูเพิ่มเติมได้จาก [5], [6] ในชุดพัฒนา GPS Architect
จะมี ARM TOOLKIT [1], [5], [6] ซึ่งเป็น Compiler/Debugger ที่ทำหน้าที่
Compile source code ภาษา C ให้เป็น Firmware สำหรับ ARM Processor และ
Download Firmware ลงเครื่องรับจีพีเอส
WINMON Monitor Program
เครื่องรับจีพีเอสจะติดต่อสื่อสารกับโปรแกรม WINMON [1], [4] ผ่านทางพอร์ต
B เพื่อแสดงค่าพิกัดตำแหน่งบนพื้นโลกที่เครื่องรับจีพีเอสตรวจจับได้
สรุปผลการทดสอบเครื่องรับจีพีเอส และแนวทางในการพัฒนาขั้นต่อไป
จากผลการทดสอบเครื่องรับจีพีเอสต้นแบบพบว่ามีปัญหาในส่วนของวงจรกรอง
175.42 MHz ซึ่งยังมีผลตอบสนองทางความถี่ไม่ตรงกับช่วงการทำงานของ IC GP2015
ซึ่งเป็น IC RF Front End จึงได้ทำการ Bypass ตัดวงจรกรองส่วนนี้ออกก่อน
เพื่อทดสอบการทำงานพบว่าเครื่องรับจีพีเอสต้นแบบ
สามารถตรวจจับพิกัดตำแหน่งจากดาวเทียมจีพีเอสได้สำหรับแนวทางในการแก้ไขปัญหา
ในส่วนของวงจรกรอง 175.42 MHz นั้น ต้องปรับค่าของ L, C ในวงจร ซึ่งขณะนี้ได้สั่งซื้อ
L, C ที่เป็น SMD หลายๆ ค่า จากต่างประเทศ เพื่อจะนำมาทดลองปรับเปลี่ยนในวงจรเพื่อให้ผลตอบสนองทางความถี่ตรงตามต้องการ
แนวทางการพัฒนาเครื่องรับจีพีเอสต้นแบบในขั้นตอนต่อไปหลังจากปรับวงจรกรอง
175.42 MHz เรียบร้อยแล้ว จะเป็นการลดขนาดของบอร์ดให้เล็กลง และสามารถพกพาไปใช้งานนอกสถานที่ได้
โดยการทำงานและวงจรยังคงยึดตามแบบของชุดพัฒนา GPS Architect อยู่
ปัญหาและอุปสรรคในการพัฒนาเครื่องรับจีพีเอสต้นแบบ
1. อุปกรณ์ที่ใช้เป็นอุปกรณ์ประเภท SMD เป็นส่วนใหญ่ ซึ่งหาซื้อปลีกได้ยากในประเทศไทย
ต้องสั่งซื้อจากต่างประเทศ ซึ่งทำให้ขั้นตอนและระยะเวลาในการจัดซื้อเพิ่มมากขึ้น
2. IC หลักๆ ที่ใช้ในเครื่องรับจีพีเอส เช่น GP2015, GP2021 และ P60ARM-B
เป็น IC เฉพาะทาง ซึ่งหาซื้อไม่ได้ในประเทศไทย ต้องติดต่อผ่านตัวแทนจำหน่ายของบริษัท
Mitel (Zarlink) ในประเทศไทยซึ่งคือบริษัท Electronics Source เพื่อขอซื้อ
ซึ่งต้องซื้อเป็นจำนวนมากๆ จึงต้องวิธีขอเป็น Sample แทน ซึ่งล่าสุดที่ขอไปเพื่อพัฒนาเครื่องรับจีพีเอสเวอร์ชั่นที่เล็กลงนี้
ปรากฏว่าทางบริษัท Electronics Source ตอบกลับมาว่าทางบริษัท Mitel (Zarlink)
ไม่มีการตอบสนองกลับมา อาจจะต้องแก้ไขปัญหาโดยซื้อจากตัวแทนจำหน่ายรายอื่นที่อยู่ในต่างประเทศ
3. เนื่องจากผู้ออกแบบ PCB ไม่มีความรู้และประสบการณ์ในการออกแบบ PCB ความเร็วสูง
จึงได้นำ Layout ของ RF Front End จากบอร์ด GPS ORION ของบริษัท Mitel
มาใช้ในเครื่องรับจีพีเอสต้นแบบ เพื่อลดข้อผิดพลาดที่อาจจะเกิดขึ้น เพราะว่าส่วน
RF Front End นี้เป็นส่วนที่รับสัญญาณความถี่ 1.57542 GHz จากดาวเทียมจีพีเอส
ซึ่งเป็นสัญญาณที่มีความถี่สูง
ผลงานและบทความวิจัย
- Correlator soft core 1 ชิ้น
- เครื่องรับจีพีเอสต้นแบบ 1 เครื่อง
- รายงานการออกแบบ GPS ชิพในระยะขั้นตอนการทำ PDR (Preliminary Design
Review) ซึ่งได้รายละเอียดและขอบเขตของสถาปัตยกรรมภายในของ GPS ชิพที่จะทำการออกแบบเบื้องต้น
- บทความวิจัยตีพิมพ์ภายในประเทศ 3 บทความดังนี้
1. “ระบบนำร่องด้วยดาวเทียมและการประยุกต์ใช้” การประชุมวิชาประจำปี 2543
ของศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ วันที่ 24-25 มิถุนายน
2543 ณ. ศูนย์ประชุมสหประชาชาติ ถนนราชดำเนิน กรุงเทพฯ
2. "การออกแบบและพัฒนา GPS chip ด้วยภาษา VHDL" การประชุมวิชาประจำปี
2543 ของศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ วันที่ 24-25
มิถุนายน 2543 ณ. ศูนย์ประชุมสหประชาชาติ ถนนราชดำเนิน กรุงเทพฯ
3. "การออกแบบชิพจีพีเอสขนาด 12 ช่องสัญญาณโดยใช้เอฟพีจีเอ"
การประชุมวิชาทางวิศวกรรมไฟฟ้า ครั้งที่ 23 วันที่ 23-24 พฤศจิกายน 2543
ณ. มหาวิทยาลัยเชียงใหม่







{kind=link}