Radio Frequency Identification
RFID คืออะไร
RFID เป็นระบบฉลากที่ได้ถูกพัฒนาตั้งแต่ปี่ ค.ศ. 1980
เพื่อวัตถุประสงค์หลักในการใช้กับงานที่ระบบฉลากแบบบาร์โค้ด (Bar code) ไม่สามารถใช้การได้
องค์ประกอบในระบบ RFID
จะมีอยู่
2 ส่วนหลักๆ คือ ส่วนฉลาก (ป้ายขนาดเล็ก) ที่จะถูกผลึกอยู่กับวัตถุที่เราสนใจ
โดยฉลากที่ว่าจะบันทึกข้อมูลเกี่ยวกับวัตถุชิ้นนั้นๆ เอาไว้
ฉลากดังกล่าวมีชื่อเรียกอย่างเป็นทางการว่า ทรานสพอนเดอร์ (Transponder,
Transmitter & Responder) หรือที่ต่อไปจะเรียกว่าว่า แทกส์ (Tags)
ส่วนที่สองมีชื่อเรียกว่า ทรานสซิฟเวอร์ (Transceiver,
Transmitter & Receiver) หรือที่ต่อไปจะเรียกว่า เครื่องอ่าน (Reader)

รูปแสดงระบบ RFID
จุดเด่นของระบบ RFID
q การอ่านข้อมูลของฉลากที่ได้โดยไม่ต้องมีการสัมผัส
q สามารถอ่านค่าได้แม้ในสภาพที่ทัศนวิสัยไม่ดี
q ทนต่อความเปียกชื้น แรงสั่นสะเทือน การกระทบกระแทก
q สามารถอ่านข้อมูลได้ถูกต้องรวดเร็ว
ปัจจุบันมีการนำระบบ RFID
มาใช้งานในงานหลายประเภท ไม่ว่าจะเป็นในบัตรชนิดต่างไ เช่น
บัตรประจำตัวประชาชน บัตรเอทีเอ็ม บัตรสำหรับผ่านเข้าออกสำนักงาน
บัตรโดยสารของสายการบิน บัตรจอดถ จนกระทั่ง ฉลากสินค้าต่างๆ
หรือแม้แต่ฝังลงในตัวสัตว์เพื่อบันทึกประวัติ เป็นต้น การนำระบบ RFID มาใช้งานก็เพื่อประโยชน์ในการตรวจสอบการผ่านเข้าออกบริเวณใดบริเวณหนึ่งหรือเพื่ออ่านหรือเก็บข้อมูลบางอย่างเอาไว้
ยกตัวอย่างในกรณีที่เป็นฉลากสินค่า ระบบ RFID ก็จะถูกนำมาไปใช้เก็บข้อมูลเกี่ยวกับสินค่า
เพื่อให้สามารถทราบที่มาที่ไปของสินค้าชิ้นนั้นๆ ได้เป็นต้น
สำหรับรูปแบบของเทคโนโลยี RFID ที่ใช้ในการดังกล่าวก็มีทั้งแบบสมาร์ตการ์ดที่สามารถถูกเขียนหรืออ่านข้อมูลออกมาได้โดยไม่ต้องมีการสัมผัสกับเครื่องอ่านบัตร
หรือคอมแทคเลสสมาร์ตการ์ด (Contractless smartcard) เหรียญ (Coin) ป้าย (Tag) หรือฉลากซึ่งมีขนาดเล็กจนสามารถแทรกลงระหว่างชั้นของเนื้อกระดาษหรือฝังเอาไว้ในตัวสัตว์ได้เลยที่เดียว
แทกส์ (Tags)
โครงสร้างภายในของแทกส์จะประกอบไปด้วย
2 ส่วนใหญ่ๆ ได้แก่ ส่วนของไอซีหรือชิปและส่วนที่สองคือขดลวดซึ่งทำหน้าที่เป็น้สาอากาศสำหรับรับส่งสัญญาณ
แทกส์ที่มีการใช้งานอยู่นั้นจะมีอยู่ 2 ชนิดใหญ่ๆ
โดยแต่ละชนิดก็จะมีความแตกต่างกันในแง่ของการใช้งาน ราคา
โครงสร้างและหลักการทำงานอยู่ ซึ่งจะขอกล่าวและอธิบายแยกเป็นหัวข้อดังนี้
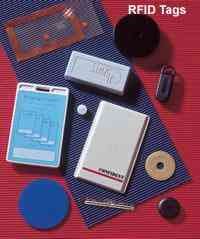
รูปแสดงรูปแบบต่างๆ ของ Tags
Passive RFID Tags
แทกส์ชนิดนี้ไม่จำเป็นต้องรับแหล่งจ่ายไฟใดๆ
เพราะมีวงจรกำเนิดไฟฟ้าเหนี่ยวนำขนาดเล็กเป็นแหล่งจ่ายไฟในตัวอยู่แล้ว
ระยะการสื่อสารข้อมูลที่ทำได้สูงสุด 1.5 เมตร มีหน่วยความจำขนาดเล็ก (ทั่วไปประมาณ
32 – 128 บิต) มีขนาดเล็กและน้ำหนักเบา ราคาต่อหน่วยต่ำ
ไอซีของแท็กส์ชนิดพาสซีฟที่มีการผลิตออกมาจะมีทั้งขนาดและรูปร่างเป็นได้ตั้งแต่แท่งหรือแผ่นขนาดเล็กจนแทบไม่สามารถมองเป็นไปจนถึงขนาดใหญ่จนสะดุดตา
ซึ่งต่างก็มีความเหมาะสมกับชนิดงานที่แตกต่างกัน
โดยทั่วไปโครงสร้างภายในส่วนที่เป็นไอซีของแท็กส์นั้นก็จะประกอบด้วย 3
ส่วนหลักๆได้แก่ ส่วนของหน่วยความจำ, ส่วนควบคุมภาคลอจิก
และส่วนของควบคุมการทำงานของภาครับส่งสัญญาณวิทยุ
Active RFID Tags
แท็กส์ชนิดนี้จะใช้แหล่งจ่ายไฟจากแบตเตอรี่ขนาดเล็ก
มีหน่วยความจำภายใจขนาดใหญ่ได้ถึง 1 เมกะไบต์
มีระยะการสื่อสารข้อมูลที่ทำได้สูงสุดถึง 6 เมตรแม้ว่าแท็กส์ชนิดนี้จะมีข้อดีอยู่หลายข้อแต่ก็มีข้อเสียอยู่ด้วยเหมือนกัน
เช่น มีราคาต่อหน่วยแพง มีขนาดค่อนข้างใหญ่ และมีระยะเวลาในการทำงานที่จำกัด
นอกจากการแบ่งจากชนิดที่ว่ามาแล้วแท็กส์ก็ยังถูกแบ่งประเภทจากรูปแบบในการใช้งานได้เป็น
3 แบบ คือ แบบที่สามารถถูกอ่านและเขียนข้อมูลได้อย่างอิสระ
(Read – write), แบบเขียนได้เพียงครั้งเดียวเท่านั้นแต่อ่านได้อย่างอิสระ
(Write-Once, Read-Many หรือ WORM) และแบบอ่านได้เพียงอย่างเดียว
(Read-only) ด้วย
อย่างไรก็ตามเนื่องจากในการใช้งานเพื่อเป็นฉลาก นิยมใช้แท็กส์ชนิดพาสซีฟมากกว่าในที่นี้จึงจะขอกล่าวถึงเฉพาะแท็กส์ชนิดนี้เป็นหลัก
เครื่องอ่าน
(Reader)
หน้าที่หลักของเครื่องอ่านก็คือการเชื่อมต่อเพื่อเขียนหรืออ่านข้อมูลจากแท็กส์
ด้วยคลื่นวิทยุ ดังรูปประกอบ ด้วย
q ภาครับและส่งสัญญาณวิทยุ
q ภาคการสร้างสัญญาณพาหะ
q สายอากาศ
q วงจรจูนสัญญาณ
q ภาคการติดต่อกับคอมพิวเตอร์ (ใช้
RS232)
การถอดรหัสสัญญาณ (Decoding)
ที่ได้รับ กระทำโดย ไมโครคอนโทรเลอร์
อัลกอริทึ่มที่อยู่ในเฟิร์มแวร์ (firmware) ของตัวไมโครคอนโทรเลอร์จะทำหน้าที่ในการส่งสัญญาณ,
ถอดรหัสสัญญาณที่ได้รับ และทำหน้าที่ติดต่อกับคอมพิวเตอร์
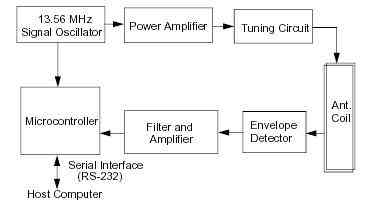
รูปแสดงโครงสร้างของเครื่องอ่าน


รูปแสดงตัวอย่างเครื่องอ่านแบบต่างๆ
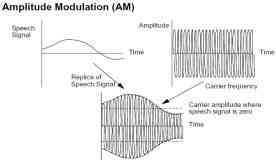
วิธีการรับและส่งข้อมูลระหว่างแท็กส์และเครื่องอ่าน
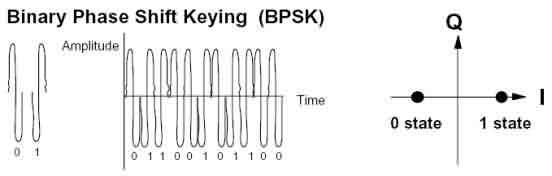
โดยมากมักจะใช้การมอดูเลตทางแอมปลิจูดหรือใข้การมอดูเลตทางแอมปลิจูดบวกกับการเข้ารหัสแมนเชสเตอร์
(Manchester encoded AM) แต่ทว่าในปัจจุบันก็มีแท็กส์ที่ใช้การมอดูเลตแบบอื่นๆด้วย
เช่น การมอดูเลชั่นแบบเฟสชิฟคีย์อิ้ง (Phase Shift Keying: PSK), ฟรีเควนซี่ชิฟคีย์อิ้ง
(Freqeuecy Shift Keying: FSK) หรือการใช้การมอดูเลตทางความถี่
(Frequency Modulation: FM)

ในการรับส่งข้อมูลหรือสัญญาณวิทยุระหว่างแท็กส์กับเครื่องอ่าน
จะทำได้อย่างมีประสิทธิภาพต่อเมื่อสายอากาศมีความยาวที่เหมาะสมกับความถี่พาหะที่ใช้งาน
เช่น เมื่อความถี่ใช้งานเป็น 13.56 เมกะเฮิรตซ์
ความยาวของเสาอากาศ (เป็นเส้นตรง) ที่เหมาะสมก็คือ
22.12 เมตร แน่นอนว่าในทางปฎิบัติเราคงไม่สามราถนำเสาอากาศที่ใหญ่ขนาดนั้นมาใช้งานกับแท็กส์ขนาดเล็กของเราได้
สายอากาศที่ดูเหมาะจะใช้ร่วมกับแท็กส์มากที่สุดก็คือสายอากาศที่เป็นขดลวดขนาดเล็กหรือที่มีชื่ออย่างเป็นทางการว่า
สายอากาศแบบแมกเนติกไดโพล (Magnetic dipole Antenna) รูปแบบของสายอากาศแบบนี้ก็จะมีอยู่หลากหลายทั้งแบบที่เป็นขดลวดพันยนแกนอากาศหรือแกนเฟอร์ไรต์,
แบบที่เป็นวงลูปที่ทำขึ้นจากลายทองแดงบนแผ่นวงจรพิมพ์
ทั้งที่เป็นลูปแบบวงกลมและสี่เหลี่ยม
ทั้งนี้ความเหมาะสมในการใช้งานก็แตกต่างกันไปตามความถี่พาหะและประเภทของงานด้วยเช่นกัน
นอกจากการรับส่งข้อมูลแล้วสายอากาศก็ยังทำหน้าที่เป็นแหล่งจ่ายไฟให้กับแท็กส์ด้วย
โดยอาศัยหลักการทำงานตามแนวคิดของไมเคิล ฟาราเดย์
เรื่องแรงดันเหน่ยวนำในขดลวดที่เกิดขึ้นจากเส้นแรงแม่เหล็ก (จากเครื่องอ่าน)
ที่มีค่าเปลี่ยนแปลงไปตามเวลา (Time-varying magnetic field)
พุ่งผ่านสายอากาศของแท็กส์ เมื่อแท็กส์และเคื่องอ่านตั้งอยู่ห่างกันในระยะ
0.16 เท่าของความยาวคลื่นพาหะที่ใช้
เรียกปรากฎการณ์ที่เกิดขึ้นนี้ว่า Transformer-type Coupling ซึ่งเป็นปรากฎการณ์แบบเดียวกับการเกิดแรงดันไฟฟ้าเหนี่ยวนำขึ้นระหว่างขดลวดปฐมภูมิ
(Primary) และขดลวดฑุติยภูมิ (Secondary) ในทรานสฟอร์เมอร์ (Transformer) จะเป็นวงจรพื้นฐานสำหรับอธิบายกลไกที่เกิดขึ้นในการส่งข้อมูลของแท็กส์
กลไกในการส่งข้อมูลของแท็กส์จะเกิดขึ้นโดยมีมอสเฟต T1 (ที่แท็กส์) ซึ่งทำงานเป็นสวิตซ์เป็นผู้ควบคุมอีกที
เพราะการเปิด/ปิดที่มอสเฟต T1 จะทำให้ค่าความต้านทานของโหลดเกิดการเปลี่ยนแปลงส่งผลให้ค่าแรงดันตกคร่อมเสาอากาศเปลี่ยนตามไปด้วย
ซึ่งถ้าหากว่าการเปิด/ปิดที่มอสเฟต T1 ถูกควบคุมด้วยข้อมูบที่ต้องการส่งก็จะทำให้เกิดการส่งข้อมูลด้วยการมอดูเลตทางแอมปลิจูดขึ้น
กรรมวิธีในการส่งข้อมูลแบบนี้เรียกว่า โหลด มอดูเลชั่น (Load Modulation) เนื่องจากว่าเป็นการส่งด้วยการมอดูเลตทางแอมปลิจูด
เมื่อรับข้อมูลจึงต้องใช้ด้วย วงจรพีคดีเท็กเตอร์ (Peak
Detector) เพื่อดึงเอาส่วนขอบของสัญญาณที่ได้รับกลับออกมา (ซึ่งนั่นก็คือข้อมูลนั่นเอง)
การเข้ารหัสแบบแมนเชสเตอร์(Manchester)
คือการเข้ารหัสข้อมูลดิจิตอลวิธีหนึ่ง
ก่อนที่ข้อมูลซึ่งผ่านการเข้ารหัสแล้วจะถูกส่งไปมอดูเลต เพื่อแก้ปัญหาเกี่ยวกับการซิงโครไนซ์ของข้อมูล
เนื่องจากการส่งกระจายสัญญาณตามปกตินั้นหากมีการส่งสัญญาณดิจิตอลในระดับเดียวติดต่อกันเป็นช่วงยาว
เช่น ส่งสัญญาณดิจิตอลที่มีค่าลอจิกเป็น 1 ออกไป 20 บิตติดต่อกัน จะทำให้การซิงโครไนซ์ของข้อมูลเกิดการคลาดเคลื่อน (เพราะโดยปกติวงจรดิจิตอลจะปรับการซิงโครไนซ์ของข้อมูลได้เฉพาะในช่วงที่มีการเปลี่ยนระดับของข้อมูลจาก
1 เป็น 0 หรือจาก 0 เป็น 1) และทำให้รับข้อมูลผิดพลาด
เพื่อป้องกันปัญหาดังกล่าวจึงจะต้องมีการนำสัญญาณดิจิตอลปกติไปผ่านเข้ารหัสเสียก่อน
โดยการเข้ารหัสแบบแมนเชสเตอร์จะเปลี่ยนให้สัญญาณดิจิตอลลอจิก 0 ถูกแทนด้วยการเปลี่ยนค่าจาก ลอจิก 0 เป็น 1 และสัญญาณดิจิตอลลอจิก 1 แทนด้วยการเปลี่ยนค่าจากลอจิก
1 เป็น 0 ข้อดีของการเข้ารหัสแบบนี้ก็คือทำให้การเปลี่ยนระดับของข้อมูลทุกๆครั้งเป็นไปอย่างแน่นอนหรือเกิดการเข้าจังหวะ
(Synchronize) กันของข้อมูลนั่นเอง
แต่ว่าการเข้ารหัสแบบนี้ก็มีข้อเสียอยู่กล่าวคือช่วงความถี่ที่ใช้ในการส่งข้อมูลต้องเพิ่มขึ้นเป็น
2 เท่า
รูปแสดงการเข้ารหัสแบบแมนเชสเตอร์ (Manchester)
ขั้นตอนการติดต่อระหว่างเครื่องอ่านและแท็กส์
1. ตัวเครื่องอ่านจะทำการส่งสัญญาณวิทยุอย่างต่อเนื่อง
และรอคอยสัญญาณตอบจากตัวแท็กส์
2. เมื่อแท็กส์ได้รับพลังงานจากสัญญาณวิทยุที่ส่งมาโดยเครื่องอ่านในระดับที่เพียงพอแล้ว
ก็จะทำการส่งสัญญาณนาฬิกาเพื่อเป็นการกระตุ้นให้แท็กส์ทำงาน
3. ข้อมูลจากแท็กส์ก็จะถูกส่งออกมาจากหน่วยความจำ
ให้กับวงจรของสายอากาศ (Antenna)
4. วงจรของสายอากาศจะทำการ มอดูเลตข้อมูล
5. ตัวเครื่องอ่านจะสามารถรับสัญญาณการเปลี่ยนแปลงของแอมปลิจูดจากแท็กส์ได้
และใช้ พีค ดีเทคเตอร์ (Peak detector) ในการแปลงสัญญาณข้อมูลที่มอดูเลตแล้วจากแท็กส์
คลื่นพาหะและมาตรฐานของระบบ RFID
ที่ใช้กันในปัจจุบัน
สำหรับคลื่นพาหะที่ใช้กันในระบบของ RFID
แบ่งออกได้เป็น 3 ย่านหลักได้แก่
q ย่านความถี่ต่ำ 125-400 กิโลเฮิรตซ์
q ย่านความถี่ปานกลาง 4-24 เมกะเฮิรตซ์
q ย่านความถี่สูง 0.9-2.45 กิกะเฮิรตซ์
ในแง่การใช้งาน 2
ย่านความถี่แรกจะเหมาะสำหรับใช้กับงานที่มีระยะการสื่อสารข้อมูลในระยะใกล้เช่น
การตรวจสอบการผ่านเข้าออกพื้นที่ การตรวจหาและเก็บประวัติในสัตว์
ส่วนย่านความถี่ท้ายสุดจะถูกใช้กับงานที่มีระยะการสื่อสานข้อมูลในระยไกล เช่น
ระบบเก็บค่าบริการทางด่วนเป็นต้น
ในแง่ของราคาและความเร็วในการสื่อสารข้อมูล
เมื่อเทียบกันแล้ว RFID ซึ่งใช้คลื่นพาหะย่านความถี่สูงเป็นระบบที่มีความเร็วในการส่งข้อมูลสูงสุดและมีราคาแพงที่สุดด้วยเช่นกัน
ส่วน RFID ที่ใช้คลื่นพาหะในอีก 2 ย่านความถี่จะมีระดับราคาและความเร็วลดหลั่นกันไป
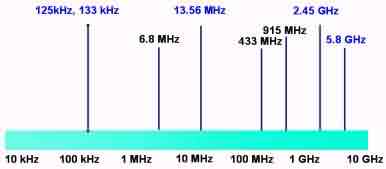
รูปแสดงย่านความถี่มาตรฐานของระบบ RFID
การป้องกันการชนกันของสัญญาณข้อมูล
(Anti-Collision)
ในการที่จะรับข้อมูลจากแท็กส์หลายๆอัน
ทั้งแท็กส์และตัวเครื่องอ่านต้องได้รับการออกแบบให้รองรับกับสภาวะที่มีแท็กส์มากกว่า
1 อันทำงาน (ส่งสัญญาณ) มิเช่นนั้นสัญญาณพาหะก็จะมีการส่งออก
ในเวลาเดียวกันทำให้เกิดการชนของสัญญาณ (Collision) จะทำให้ไม่มีข้อมูลใดๆส่งถึงตัวเครื่องอ่านเลย
การติดต่อระหว่างแท็กส์กับตัวเครื่องอ่านเปรียบเสมือน บัสแบบอนุกรม
แต่บัสชนิดนี้จะในการส่งสัญญาณจะใช้อากาศเป็นตัวกลาง
ในระบบบัสที่ใช้เคเบิ้ลเป็นตัวกลางก็ต้องมีการควบคุมไม่ให้เกิดการชนกันของสัญญาณ RFIDก็จำเป็นที่จะต้องมีการป้องกันให้มีการส่งสัญญาณจากแท็กส์อันเดียวต่อช่วงเวลานั้นเช่นกัน
