|
การกำหนดตำแหน่งบนพื้นพิภพ ( Global Positioning System : GPS ) |
ฐปนนนท์ นิลรัตน์
|
บทนำ |
สิ่งที่มนุษย์เราต้องใช้ตั้งแต่เริ่มเดินทางรอบโลก คือ
สิ่งที่ช่วยบอกเราได้ว่ากำลังเดินทางไปยังตำแหน่งใด ๆ
บางท่านอาจคิดว่าเป็นเรื่องธรรมชาติ
ที่มนุษย์เราน่าจะมีเครื่องมืออะไรสักอย่างที่ใช้การได้มานานแล้ว ก่อนที่จะมีระบบ GPS
เรายังไม่เคยมีเครื่องมือที่นำมาใช้บอกตำแหน่งและทิศทางที่สมบูรณ์เลย
จะมีก็เพียงแต่เข็มทิศเท่านั้นที่ใช้บอกทิศทาง มนุษย์เรามีวิวัฒนาการการบอกทางมา
ตั้งแต่สมัยแรกด้วยวิธีสังเกตจากดวงดาว ซึ่งใช้การได้ดีเพราะดาวอยู่ห่างจาก
โลกเรามาก ทำให้สามารถมองเห็นกลุ่มดาวจากที่ต่าง ๆ ในบริเวณกว้างได้
แต่การวัดดาวทำได้เฉพาะตอนกลางคืนและต้องเป็นคืนที่ท้องฟ้าแจ่มใสเท่านั้น
เครื่องมือที่ทันสมัยในยุคอิเลคทรอนิคส์ ซึ่งมนุษย์ได้สร้างขึ้นสำหรับการเดินเรือแบบใหม่ชื่อระบบ LORAN ที่ใช้คลื่นวิทยุซึ่งติดตั้งตามพื้นที่ส่วนต่าง ๆ
และอีกระบบต่อมาใช้ดาวเทียมเหมือนระบบ GPS คือ
ระบบที่เรียกว่า "TRANSIT SYSTEM" หรือ
"SATNAV" ทั้งสองระบบที่กล่าวมาข้างต้น
ปัจจุบันได้ยกเลิกการใช้งานแล้วเนื่องจากมีข้อบกพร่องในการบอกตำแหน่ง
คือ ในส่วนของระบบ LORAN นั้นสามารถที่จะบอกตำแหน่งได้เพียงบริเวณหนึ่งๆเท่านั้น
ไม่สามารถที่จะทำการบอกตำแหน่งได้ครอบคลุมทั้งหมด ส่วนระบบ TRANSIT
นั้น สามารถที่จะบอกตำแหน่งครอบคลุมพื้นที่ได้มากกว่า
แต่ก็มีข้อบกพร่อง คือ วงโคจรดาวเทียมของระบบอยู่ในระดับต่ำและมีจำนวนน้อยเกินไป
และเนื่องจากระบบ TRANSIT ใช้วิธีการวัดคลื่นแบบ Doppler
ซึ่งถ้ามีการเคลื่อนไหวเครื่องรับ
สัญญาณเพียงเล็กน้อยก็จะเกิดความคลาดเคลื่อนในการบอกตำแหน่งไปได้มาก
|
|
|
รูปที่ 1 แสดงรูปดาวเทียม NAVSTAT |
|
GPS ระบบนำร่องที่ง่ายต่อการใช้ |
กระทรวงกลาโหม ประเทศสหรัฐอเมริกา ได้ดำเนินการโครงการ Global
Positioning System หรือ "GPS" ขึ้น
GPS จะใช้ดาวเทียมจำนวน 24 ดวง
โคจรอยู่ในระดับสูงที่พ้นจากคลื่นวิทยุรบกวนของโลกและวิธีการที่สามารถให้ความถูกต้อง
เพียงพอที่จะใช้ชี้บอกตำแหน่งได้ทุกแห่งบนโลกตลอดเวลา 24
ชั่วโมง จากการนำมาใช้งานจริงจะให้ความถูกต้องสูง
โดยที่ความคลาดเคลื่อนมาตรฐานของตำแหน่งทางราบต่ำกว่า 50
เมตร และถ้ารังวัดแบบวิธี "อนุพันธ์"
(Differential) จะให้ความถูกต้องถึงระดับเซนติเมตร
จากการพัฒนาทางด้านอุปกรณ์คอมพิวเตอร์ทำให้สามารถผลิตเครื่องรับ
GPS ที่มีขนาดลดลง และมีราคาถูกลงกว่าเครื่องรับระบบ TRANSIT
เดิมเป็นอันมาก
ปัจจุบันมีการนำ GPS มาใช้งานในหลายสาขาวิชาที่เกี่ยวข้องกับงานสำรวจ
อาทิเช่น ภูมิศาสตร์ วิศวกรรมศาสตร์
สิ่งแวดล้อม ได้แก่ การนำ GPS
มาใช้ในการกำหนดขอบเขตและจุดที่แน่นอนของป่าสงวน และอุทยาน
ใช้ในการบอกตำแหน่งเพื่อใช้ออกงานวงรอบ (TRAVERS) การใช ้GPS
ในการสำรวจภูมิประเทศเพื่อทำแผนที่เส้นชั้นความสูง (Contour)
และงานถนนหรือแม้แต่การนำ GPS มาใช้ตรวจสอบรายละเอียดความถูกต้องของงานโครงข่ายสามเหลี่ยม
และงานวงรอบ เป็นต้น
|
ระบบดาวเทียม GPS |
ลักษณะทั่วไปของระบบ GPS ประกอบด้วยส่วนประกอบที่สำคัญ
3 ส่วน ได้แก่
1. ส่วนอวกาศ
2. สถานีควบคุม
3. ผู้ใช้
1. ส่วนอวกาศ (Space
Segment)
ในระบบดาวเทียม GPS จะประกอบด้วยดาวเทียมทั้งหมด 24 ดวง
โดยดาวเทียมจำนวน 21 ดวง จะใช้ในการบอกค่าพิกัด ส่วนที่เหลือ
3 ดวง จะสำรองเอาไว้ ดาวเทียมทั้ง 24 ดวงนี้จะมีวงโคจรอยู่
6 วงโคจรด้วยกัน โดยแบ่งจำนวนดาวเทียมวงโคจรละ 4 ดวง และมีรัศมีวงโคจรสูงจากพื้นโลกประมาณ 20,200
กิโลเมตร (12,600 ไมล์) วงโคจรทั้ง 6
จะเอียงทำมุมกับเส้นศูนย์สูตร (Equator) เป็นมุม
55 องศา ในลักษณะสานกันคล้ายลูกตะกร้อ
ดาวเทียมแต่ละดวงจะใช้เวลาในการโคจรครบรอบ 12 ชั่วโมง นั่น
คือ คาบของการโคจรเป็น 12 ชั่วโมง/รอบ ความถี่ที่ใช้ในการบอกตำแหน่งค่าพิกัดของดาวเทียมแต่ละดวงมี
2 ความถี่ คือ ความถี่ L1:1,575.42 MHz และ
ความถี่ L2:1,27.60 MHz
|
|
|
รูปที่ 2
แสดงตำแน่งและการโคจรของดาวเทียม GPS รอบโลก |
|
|
|
รูปที่ 3
แสดงการโคจรของดาวเทียม GPS รอบโลก |
2. สถานีควบคุม (Control Station
Segment)
ในส่วนของสถานีควบคุมจะประกอบด้วย 5 สถานีย่อย
(Monitor Station) ตั้งอยู่ที่เมือง Diego
Garcia, Ascension Island, Kwajalein, และ Hawaii ส่วนสถานีควบคุมหลัก (Master Control Station) 1
สถานี ซึ่งเป็นศูนย์ควบคุมการทำงานของระบบดาวเทียม GPS ตั้งอยู่ที่เมือง
Colorado Springs รัฐ Colorado สหรัฐอเมริกา
สถานีควบคุมต่าง ๆ เหล่านี้มีหน้าที่คอยติดต่อสื่อสาร
(Tracking) กับดาวเทียม ทำการคำนวณผล (Computation) เพื่อบอกตำแหน่งของดาวเทียมแต่ละดวง
และส่งข้อมูลที่ได้ไปยังดาวเทียมอยู่ตลอดเวลา ทำให้ข้อมูลที่ได้เป็นข้อมูลที่ทันสมัยอยู่เสมอ
|
|
|
รูปที่ 4
แสดงสถานีควบคุมระบบดาวเทียม GPS 5 แห่ง |
3. ส่วนผู้ใช้ (Use
Segment)
ผู้ใช้ประกอบด้วย 2 ส่วนใหญ่
ๆ คือ ส่วนที่เกี่ยวข้องกับพลเรือน (Civilian) และส่วนที่เกี่ยวกับทางทหาร
(Military) ในส่วนของผู้ใช้จะมีหน้าที่พัฒนาเครื่องรับสัญญาณ
(Receiver)ให้ทันสมัยและสะดวกแก่การใช้งาน
สามารถที่จะใช้ได้ทุกแห่งในโลก และให้ค่าที่มีความถูกต้องสูง
|
|
111111111 |
|

|
รูปที่ 5
แสดงการใช้งาน GPS |
|
|
|
รูปที่ 6
แสดงส่วนประกอบของระบบดาวเทียม GPS |

|
ส่วนประกอบของเครื่องรับสัญญาญาณดาวเทียม
GPS |
โดยทั่วไปเครื่องรับสัญญาณดาวเทียม ( Receiver) ประกอบด้วย 3 ส่วนหลัก คือ
1. ตัวเครื่อง (Body)
2. ส่วนให้พลังงาน
(Power Supply)
3. ส่วนเสาอากาศ
(Antenna)
|
|
1 |
|
|
รูปที่ 7
แสดงเครื่องรับสัญญาญาณดาวเทียม GPS |
||

|
การทำงานของ
GPS |
หลักการพื้นฐานของ GPS เป็นเรื่องง่าย ๆ แต่อุปกรณ์ของเครื่องมือถูกสร้างขึ้นด้วยวิทยาการขั้นสูง
การทำงาน GPS แบ่งออกได้เป็น 5 ขั้นตอน
คือ
1. การรับสัญญาณจากดาวเทียมโดยหลักการรูปสามเหลี่ยมระหว่างดาวเทียมกับเครื่องรับ
2. GPS วัดระยะโดยใช้เวลาเดินทางของคลื่นวิทยุ
3. ในดาวเทียมและเครื่องรับจำเป็นจะต้องมีนาฬิกาที่ละเอียดสูงมาก
4. นอกจากระยะทางแล้วจะต้องทราบตำแหน่งของดาวเทียมที่อยู่ในอวกาศด้วย
5. ในชั้นบรรยากาศไอโอโนสเฟียร์
(Ionosphere) และชั้นบรรยากาศโลก (Atmosphere) ความเร็วคลื่นวิทยุเดินทางได้ช้าลง จึงต้องทำการแก้ไขจุดนี้ด้วย
|
|
|
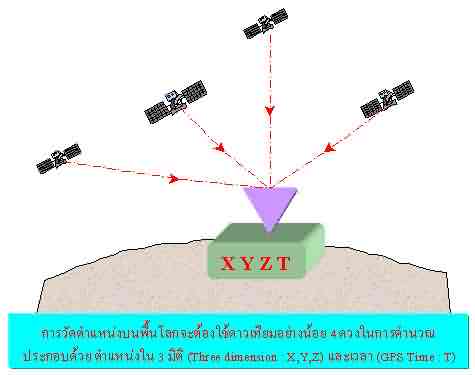
รูปที่ 8
แสดงการวัดตำแหน่งบนพื้นโลก |
|
|
|
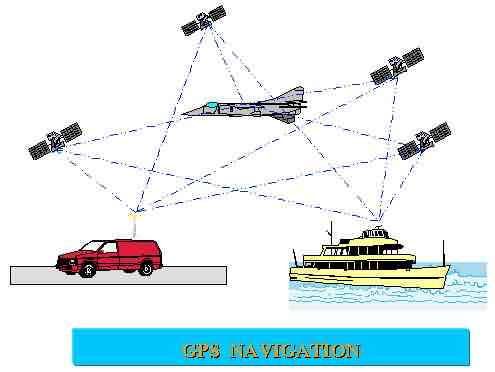
รูปที่ 9
แสดงการนำหนทางบก ทางอากาศ และทางน้ำ |
ขั้นที่ 1
การรับสัญญาณจากดาวเทียมเพื่อให้ได้ตำแหน่ง
GPS จะต้องหาระยะระหว่างดาวเทียมกับเครื่องรับ
GPS ดาวเทียมจะเป็นเหมือนหมุดหลักฐานสำหรับการวัดระยะ สิ่งที่เราต้องรู้เพื่อใช้ในการคำนวณ
คือ ตำแหน่งดาวเทียมดวงนั้นเพื่อให้ได้ระยะทางที่ถูกต้อง
สมมติว่าเราอยู่ห่างจากดาวเทียม A 11,000 ไมล์ ขณะเดียวกันเราหาได้ว่าระยะจากดาวเทียม B 12,000
ไมล์ ดังนั้นตำแหน่งเรา จึงอยู่ที่ทรงกลมที่มีศูนย์กลางที่ดาวเทียม A กับดาวเทียม B รัศมี 11,000
ไมล์ และ 12,000 ไมล์ ตัดกัน ดังนั้น ถ้าเราได้ระยะจากดาวเทียมดวงที่ 3
ก็บอกตำแหน่งได้แน่นอนยิ่งขึ้น เช่น เรารู้ว่าระยะจากดาวเทียม C 13,000 ไมล์ ก็จะบอกตำแหน่งที่ทรงกลมตัดกันอยู่เพียง 2 จุดเท่านั้น เราวัดหาระยะ ดาวเทียมดวงที่สี่ หรือจากการวัดระยะดาวเทียม 3
ดวงก็สามารถบอกตำแหน่งได้เลย เพราะ 2 ค่าที่ได้จะมีอยู่หนึ่งค่าที่ไม่เป็นจริง เพราะอยู่ห่างจากโลกเรามาก
ในกรณีที่รู้ค่าความสูงของตำแหน่งที่วัดแน่นอน เช่น ในทะเล
ก็ไม่จำเป็นที่จะต้องวัดดาวเทียมดวงที่ 4 เครื่องมือรังวัดบางเครื่องจะให้เลือกใช้วัดแบบ
2D คือ พิกัดราบอย่างเดียว แต่ถ้าต้องการได้ตำแหน่ง 3D ต้องวัดจากดาวเทียม 4 ดวง
ขั้นที่ 2
การวัดระยะจากดาวเทียม
จากการที่ GPS ต้องรู้ระยะทางจากเครื่องรับถึงดาวเทียมจึงต้องมีวิธีการหาระยะ
วิธีการหาระยะใช้สมการง่าย ๆ คือ อัตราความเร็วคูณด้วยเวลา
ตัวอย่าง เช่น ถ้ารถยนต์เคลื่อนที่ด้วยความเร็ว
60 กม./ชม. เวลา 2 ชม. รถยนต์จะเคลื่อนที่ได้เป็นระยะทางเท่าใด
การคิดใช้ความเร็ว (60 กม./ชม.)
ได้ระยะทาง (120 กม.) ระบบ GPS ทำงานเพื่อหาว่าสัญญาณวิทยุที่ส่งมาจากดาวเทียมจนถึงเครื่องรับใช้เวลาเดินทางนานเท่าใด
แล้วนำเวลาที่หาได้มาคำนวณระยะทาง คลื่นวิทยุเดินทางด้วยความเร็วแสงคือ
186,000 ไมล์ต่อวินาที
ดังนั้นถ้าเรารู้เวลาแน่นอนที่ดาวเทียมเริ่มปล่อยสัญญาณวิทยุ
และเวลาที่เราเริ่มรับสัญญาณนั้นได้ ก็จะได้เวลาที่คลื่นวิทยุเดินทาง
ทำเวลาเป็นวินาทีคูณกับ 186,000 ไมล์
ก็จะได้ระยะทางจากเครื่องรับถึงดาวเทียม เราต้องได้ระยะเช่นนี้
3 ค่าจากดาวเทียมสามดวง จึงจะนำมาหาตำแหน่งได้
เมื่อเป็นเช่นนี้ แน่นอนนาฬิกาจะต้องเป็นนาฬิกาที่ดีมาก
เพราะเวลาที่วัดได้จะต้องน้อยมากเพราะแสงเดินทางเร็วมาก
โดยปกติถ้าดาวเทียมดวงที่ส่งสัญญาณอยู่เหนือศีรษะเราพอดีเวลาที่คลื่นวิทยุจะใช้เวลาเดินทางถึงเราเพียง
.06 วินาที เท่านั้น
ด้วยเหตุนี้ GPS
จึงได้นำเอาวิวัฒนาการทางอิเลคทรอนิคส์มาใช้เพื่อให้ได้ความถูกต้องของเวลาในระดับที่
GPS ต้องการ ต้องใช้นาฬิกาอิเลคทรอนิคส์ที่มีราคาแพงมาก
ซึ่งให้เวลาที่ละเอียดถูกต้องสูง แต่ GPS จำเป็นต้องรู้เวลาที่ละเอียดยิ่งกว่ามาก
นาฬิกาดาวเทียมจะอ่านเวลาได้เป็นนาโนเซคกัน หรือ 0.000000001
วินาที เรารู้เวลาที่สัญญาณเริ่มส่งจากดาวเทียมได้อย่างไร
เคล็ดลับที่สำคัญในการหาเวลาการเดินทางของคลื่นวิทยุก็คือ
ต้องรู้ว่าเวลาที่แน่นอนที่สัญญาณเริ่มออกเดินทางจากดาวเทียม ผู้ออกแบบเครื่อง GPS
ใช้หลักการจำลองแบบสัญญาณที่ส่งจากดาวเทียม
และสัญญาณที่อยู่ในเครื่องรับให้เป็นแบบเดียวกัน ดังนั้นเครื่องทั้งสองจะต้องสร้างรหัสในเวลาที่ตรงกัน
(Pseudo Random Code) ดังนั้นสิ่งที่เราต้องกระทำก็คือการรอรับรหัสที่ดาวเทียมปล่อยออกมาและมองย้อนกลับไปว่าเครื่องของเราได้เริ่มสร้างรหัสที่มีรูป
เหมือนกันแล้วเป็นเวลานานเท่าใด
เวลาที่แตกต่างก็คือเวลาที่คลื่นวิทยุใช้เดินทางมาถึงเครื่องรับ
ข้อดีของการใช้รหัสที่ส่งเป็นชุดหรือตัวเลขหลายตัวเราสามารถเปรียบเทียบหาตรงเวลาใดก็ได้ตามต้องการ
ไม่จำเป็นต้องใช้เลขหนึ่งอย่างเดียว ใช้ตัวเลขคู่ใดก็ได้ รหัส Pseudo Random ใน GPS ไม่ใช่ตัวเลขตามตัวอย่างที่กล่าวมาทั้งในดาวเทียมและเครื่องรับจะสร้างชุดรหัสเชิงตัวเลขที่ซับซ้อน
การที่ต้องสร้างให้ซับซ้อนก็เพื่อสามารถนำรหัสทั้งสองมาเปรียบเทียบกันได้ง่ายและไม่วุ่นวายและยังมีเหตุผลทางวิชาการประกอบด้วย
รหัสซ้ำซ้อนนี้ทำให้มองเห็นเหมือนคลื่นวิทยุที่ต่อเนื่องกันยาว ๆ
ขั้นที่ 3
การได้เวลาที่ถูกต้อง
แสงเดินทางด้วยความเร็ว
186,000 ไมล์/วินาที จะเกิดอะไร
ถ้าเครื่องรับนับเวลาคลาดไป 1/100 วินาที
ผลคือการวัดเราจะผิดไปถึง 1,860 ไมล์
และเราจะรู้ได้อย่างไรว่าเครื่องรับและดาวเทียมได้สร้างรหัสตรงเวลาเดียวกันหรือไม่
ปัญหานี้สามารถอธิบายได้คือ ในดาวเทียมใช้นาฬิกาอะตอม
ซึ่งจะให้เวลาที่ถูกต้อง ในดาวเทียมแต่ละดวงจะมีนาฬิกาอะตอมนี้ติดตั้งอยู่ถึง
4 เครื่อง
ทั้งนี้เพื่อให้แน่ใจว่าจะต้องใช้เวลาจากนาฬิกาเครื่องใดเครื่องหนึ่งอย่างแน่นอน
นาฬิกาอะตอมไม่ได้เดินด้วย
พลังงานอะตอม ที่ให้ชื่ออะตอมเพราะว่าใช้การวัดจังหวะจากอนุภาคของสารเฉพาะ
เหมือนเครื่องเคาะจังหวะ
อะตอมนี้จะให้เวลาที่แน่นอนและถูกต้องที่สุดที่มนุษย์เราได้ประดิษฐ์มา
ดังนั้นถ้านาฬิกาบอกเวลาเที่ยง 12.00 น. ก็หมายถึงเวลาเที่ยง 12.00 จริง โชคดีที่มีวิธีให้หาเวลาได้ถูกต้องใช้งานได้ทั้งที่เครื่องรับ GPS ติดนาฬิกาที่มีความถูกต้องธรรมดาเท่านั้น และวิธีนั้นก็คือ
จะต้องทำงานวัดระยะจากดาวเทียม
สำหรับกรณีนี้เพิ่มอีกหนึ่งดวงเพื่อใช้ในการปรับแก้เวลาของเครื่องรับที่ไม่สมบูรณ์
ซึ่งเป็นเพียงแนวคิดที่ธรรมดา
เป็นฐานข้อมูลของการทำงานของเครื่อง GPS (ดูรูปที่ 5,6
ประกอบ) จะแสดงให้เห็นว่าการวัดระยะจากดาวเทียมเพิ่มอีกหนึ่งดวงช่วยได้อย่างไร
|
|
|
รูปที่ 10
แสดงการทำงานของระบบ GPS |
|
|
111 |
|
|
รูปที่ 11
แสดงการทำงานของระบบ GPS |
||
สมมติว่า
นาฬิกาในเครื่องรับส่วนใหญ่เป็นควอทซ์ไม่เที่ยงตรงเท่ากับนาฬิกาอะตอม
สมมตินาฬิกาเครื่องรับเดินช้า 1 วินาที ดังนั้นตัวเครื่องบอกเวลาเที่ยง
เวลาจริงก็จะเป็น 12:00:01 น. ปกติเราใช้หน่วยวัดระยะไมล์หรือกิโลเมตร แต่เนื่องจากระยะทางคำนวณจากเวลา
ดังนั้นจะใช้เวลาแทนระยะทาง
ซึ่งจะช่วยให้เห็นความคลาดเคลื่อนของนาฬิกาได้ชัดขึ้น
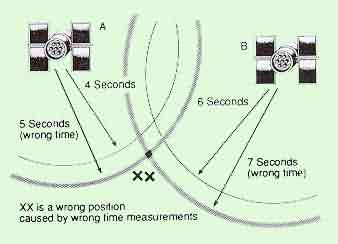
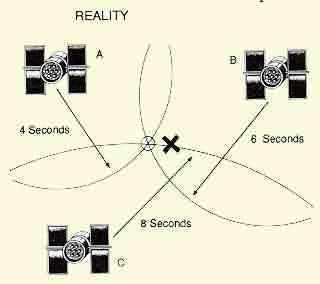
สมมุติความจริงเราอยู่ห่างจากดาวเทียม A เป็นเวลา
4 วินาที และห่างจากดาวเทียม B เป็นเวลา
6 วินาที ในแบบรูปสองมิติ หาเส้นตัดกันได้ สมมุติตัดกันได้
X ดังนั้นที่ X คือตำแหน่งที่เราอยู่จริงซึ่งเราควรจะได้
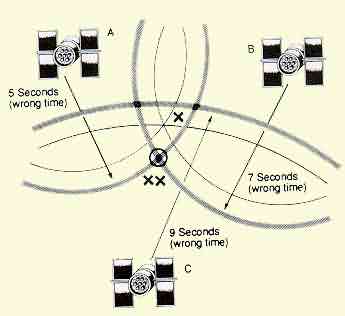
ถ้านาฬิกาทำงานถูกต้อง แต่ถ้านาฬิกาเครื่องรับช้าไป 1 วินาที
เครื่องรับก็จะบอกระยะจาก A 5 วินาที
และระยะจากดาวเทียม B 7 วินาที และมีเส้นตัดกันที่จุด
XX ดังนั้น ที่ XX ตำแหน่งที่เครื่องรับจะบอกเวลา และถ้าเราไม่มีวิธีที่จะรู้ว่าเครื่องรับเดินช้า
ก็ต้องถือว่าตำแหน่งที่ได้ถูกต้องแล้ว
แต่ระยะที่ได้อาจคลาดเคลื่อนเป็นกิโลเมตรก็ได้
และเราจะรู้ว่าไม่ถูกต้องก็เมื่อเราเดินตามที่เครื่องบอกแล้วจุดนั้นไม่ตรงกับความเป็นจริง
เช่น เข้าไปในภูเขาหิน แต่ในการคำนวณจะไม่แสดงให้เรารู้ได้เลย
ตามหลักวิชาตรีโกณเพื่อหาตำแหน่ง
ต้องวัดระยะทางเพิ่มอีกหนึ่งเส้นตามรูปสองมิติที่แสดงเป็นระยะจากดาวเทียมเป็นดวงที่สาม
สมมติว่าถ้าระยะจริงจากดาวเทียม C 8 วินาที จะเห็น วงกลมทั้งสามวงตัดกันตามรูป
ต่อไปขอให้เราเพิ่มระยะทางของรัศมีแต่ละวงอีกหนึ่งวินาทีตามค่าช้าของนาฬิกา
แสดงในรูปด้วยเส้นประจะเป็นระยะเทียม (Pseudo Range) ที่เกิดจากการที่นาฬิกาเดินช้า
คำว่า Pseudo Range ที่ใช้ในวงกลม GPS เพื่อบอกว่าระยะนั้นยังมีค่าผิดพลาดอยู่
(ปกติค่าความผิดพลาดเกิดจากเวลา) จากภาพจะสังเกตเห็นว่าวงกลมจากดาวเทียม
A ดาวเทียม B ตัดกันที่จุด XX แต่วงกลมจากดาวเทียม C จะไม่ตัดตรงจุดเดียวกัน
ดังนั้นจึงไม่มีจุดที่จะเกิดขึ้นได้จริง จากการที่ระยะห่างจากดาวเทียม
A 5 วินาที ดาวเทียม B 7
วินาที และดาวเทียม C 9 วินาที
ภายในเครื่องรับ GPS จะมีโปรแกรมที่จะนำเอาชุดของการวัดที่ไม่สมบูรณ์มาคำนวณ
และหาค่าที่นาฬิกาเดินคลาดเคลื่อนมาปรับแก้ให้ถูกต้อง
ดังนั้นคอมพิวเตอร์จะเริ่มทำการลบ (หรือบวก)
เวลา
ให้กับทุก ๆ การวัดโดยเท่า ๆ กัน จนกว่าจะได้ค่าคำตอบที่ทุก ๆ
ระยะมาตัดกันที่ตำแหน่งเดียวกัน ด้วยโปรแกรมก็จะพบว่าโดยการลบเวลาหนึ่งวินาทีออกจากระยะที่วัดได้
ก็จะทำให้วงกลมทั้งสามตัดกันที่จุดเดียวกัน จึงได้ว่านาฬิกาเดินช้าไป
1 วินาที ความจริงในการคำนวณหาคำตอบในคอมพิวเตอร์ใช้การหาจากสมการพิชคณิต
4 สมการ สำหรับหาค่าที่ต้องการรู้ 4 ค่านั่นเอง และก็จะได้ค่าที่ต้องแก้เวลาของนาฬิกาได้
แนวคิดก็เหมือนเดิมคือการที่รับสัญญาณจากดาวเทียมเพิ่มอีกหนึ่งดวง
สามารถขจัดความคลาดเคลื่อนของเวลาที่เกิดจากนาฬิกาเดินไม่ถูกต้องได้
การวัดหาค่าแบบ 3 มิติ ต้องการใช้ดาวเทียม 4 ดวง แบบ 3 มิติ ได้ค่าการวัดถึง 4 ค่าเพื่อจะได้กำจัดข้อผิดพลาดที่เกิดขึ้น เพราะว่าเวลาทำงานจะต้องตรวจดูเวลาในตารางดาวเทียมเพื่อสามารถวัดหาตำแหน่งได้ถูกเวลานั้นต้องมีดาวเทียมขึ้นอยู่อย่างน้อย
4 ดวง
ระบบ GPS เมื่อการปล่อยดาวเทียมครบถ้วนก็จะมีดาวเทียมใช้งานได้
24 ดวง ดังนั้น
จะมีดาวเทียมมากกว่า 4 ดวง บนท้องฟ้าเสมอทุกตำแหน่ง
ตอนที่ดาวเทียม GPS ยังไม่ปล่อยให้ครบ
บางคนใช้ GPS ผสมกับระบบอื่น ๆ เช่น ระบบ LORAN ซึ่งจะให้ความถูกต้องใกล้เคียงกับ GPS การทำเช่นนี้โดยการใช้ดาวเทียม
GPS เป็นจุดบังคับให้
ระบบ LORAN การออกแบบเครื่องรับ GPS จะต้องทำให้สามารถรับสัญญาณดาวเทียมได้
4 ดวงด้วย โดยมีหลักอยู่ว่า
ถ้าต้องการให้เครื่องแสดงผลการวัดต่อเนื่อง
และเป็นแบบทันทีทันใด(Real Time) เครื่องรับต้องมีช่องรับสัญญาณ
4 ช่อง
โดยช่องรับสัญญาณหนึ่งช่องจะรับสัญญาณจากดาวเทียมแยกแต่ละดวงจึงสามารถรับสัญญาณ 4 ดวง
ในเวลาพร้อมกันได้
ในการใช้งานบางครั้งก็ไม่ต้องการความถูกต้องและแสดงผลรวดเร็วทันที
กรณีนี้ เรื่องรับสัญญาณช่องเดียวอาจเป็นการเพียงพอ เครื่องรับที่มีช่องรับสัญญาณ
ช่องเดียวจะทำการรับดาวเทียม 4 ดวงได้โดยการจัดลำดับเรียงการรับสัญญาณจากดาวเทียมจนครบ
4 ดวง แล้วจึงนำค่ามาคำนวณผลเวลาที่ใช้ในการรับและการคำนวณนี้
อาจใช้เวลาระหว่าง 2-30 วินาที
ซึ่งในบางครั้งก็เร็วพอเพียงแล้ว
แต่เครื่องรับประเภทนี้จะทำงานในการหาความเร็วได้ไม่ดี
การใช้หาความเร็วเป็นการใช้ประโยชน์อย่างหนึ่งของเครื่อง GPS เครื่อง GPS สามารถแสดงความเร็วในการเดินทางได้ถูกต้องมาก
และในขณะที่ทำการรับสัญญาณจากดาวเทียมอยู่นั้น ถ้าเครื่องรับมีการเคลื่อนไหว
เครื่องรับประเภท 1 ช่องสัญญาณมีผลทำให้การวัดเกิดความผิดพลาดได้มาก
ข้อเสียอีกประการหนึ่งของเครื่องรับสัญญาณช่องเดียวเกิดขึ้น
เมื่อดาวเทียมส่งรายงานสภาพระบบ (System Condition Message) สำหรับการเปลี่ยนรับดาวเทียมดวงใหม่
ซึ่งต้องใช้เวลาติดต่อถึง 30 วินาที
ขณะนั้นจะทำให้เครื่องไม่สามารถทำงานคำนวณบอกทิศทางได้ ที่นิยมใช้ก็คือเครื่องรับที่มี 2 ช่องรับสัญญาณ
ช่องหนึ่งจะทำการวัดคำนวณหาเวลา ในขณะที่อีกช่องหนึ่งพยายามจับคลื่นวิทยุจากดาวเทียมดวงต่อไปที่จะทำการวัด
เมื่อช่องแรกวัดเสร็จก็สามารถเปลี่ยนไปรับสัญญาณดาวเทียมดวงใหม่ได้ทันทีโดยไม่ต้องเสียเวลาในการค้นหาและรับสัญญาณดาวเทียมอีกช่อง
ที่สองจึงทำหน้าที่คล้ายกับผู้ดูแลทำความสะอาดบ้าน
และค้นหาดาวเทียมดวงต่อไปที่จะรับสัญญาณต่อและเมื่อไม่ใช้สำหรับการจับดาวเทียม
ช่องที่สองก็สามารถทำงาน
ในการวัดหาเวลาได้เช่นเดียวกัน วิธีการสองช่องรับสัญญาณนี้ช่วยให้การรับสัญญาณเรียงดาวเทียมได้เร็วขึ้นอย่างเห็นได้ชัด
และวิธีนี้เครื่องสามารถแสดงตำแหน่งที่คำนวณได้เร็ว ซึ่งเรียกว่าการ
Updating Position ประโยชน์อีกประการหนึ่งก็คือเครื่องรับสองช่องสามารถให้โปรแกรมรับดาวเทียมมากกว่า
4 ดวงก็ได้ ดังนั้น
ในขณะทำงานบอกทางอาจมีดาวเทียมดวงหนึ่งดวงใดรับสัญญาณขาดหายไป
ก็จะสามารถใช้ดาวเทียมนี้สำรองใช้แทนโดยไม่ให้การนำทางขาดตอน
ขั้นที่ 4
ต้องรู้ตำแหน่งของดาวเทียมก่อน
ตามที่กล่าวมาทั้งหมดเราสมมติว่ารู้ตำแหน่งของดาวเทียมมาแล้ว
จึงสามารถสร้างรูปสามเหลี่ยมขึ้นมาได้ แต่เราจะรู้ตำแหน่งของดาวเทียมที่อยู่สูงถึง
11,000 ไมล์ ได้อย่างไร
ความสูงเช่นนี้จะไม่ทำให้มีคลื่นรหัสจากโลกไปรบกวนได้
วัตถุที่อยู่สูงขึ้นไปเช่นนี้ผ่านพ้นจากชั้นบรรยากาศของโลก
หมายความว่าวงโคจรดาวเทียมรอบโลกแสดงได้ด้วยสมการคณิตศาสตร์
ธรรมดาเหมือนกับดวงจันทร์ที่หมุนรอบโลกเป็นเวลาล้าน ๆ ปี โดยไม่มีการเปลี่ยนแปลง
ดาวเทียม GPS เดินตามวงโคจรตามแนวที่กำหนดไว้แน่นอนกองทัพอากาศสหรัฐมีหน้าที่นำดาวเทียมเข้าสู่วงโคจรตามแผนที่กำหนดไว้ในโครงการ
และเนื่องจากในอวกาศว่างเปล่าไม่มีแรงเสียดทาน
ดาวเทียมก็จะโคจรอยู่ในวงที่แน่นอนตามกำหนด
วงโคจรของดาวเทียมแต่ละดวงถูกกำหนดไว้ล่วงหน้าแล้ว และเครื่องรับ GPS สามารถรับตารางดาวเทียม (Almanac) ไว้ในหน่วยความจำคอมพิวเตอร์ได้
ตารางดาวเทียมจะบอกได้ว่าในท้องฟ้าจะมีดาวเทียมดวงไหนขึ้นลงเวลาใดบ้าง
มีการติดตามการโคจรของดาวเทียมทุกดวงอย่างสม่ำเสมอแน่นอน
สมการวงโคจรของดาวเทียมจะต้องถูกต้องตามตัวเลขของมันเองอยู่แล้ว
แต่เพื่อให้ทุกอย่างถูกต้องสมบูรณ์ กระทรวงกลาโหมสหรัฐจึงต้องทำการติดตามการโคจรของดาวเทียมทุกดวงอย่างสม่ำเสมอการที่ต้องติดตามดาวเทียมนี้เป็นเหตุผลหนึ่ง
ที่ทำให้ต้องสร้างดาวเทียม GPS ให้หมุนเร็วกว่าการหมุนของโลก
ดาวเทียมหมุนรอบโลกทุก 12 ชั่วโมง
และจะโคจรผ่านสถานีติดตามดาวเทียมของ DoD วันละ 2 ครั้ง ซึ่งทำให้สถานีติตตามนี้สามารถวัดความสูง ตำแหน่ง
และความเร็วของดาวเทียมได้อย่างถูกต้อง
ความแปรเปลี่ยนของวงโคจรที่สถานีติดตามค้นหาก็คือ ค่าความคลาดเคลื่อนของอีฟิเมอริส
(Ephemeris Error) ปกติจะมีขนาดน้อยมากโดยเกิดจากแรงดึงดูดของดวงจันทร์และดวงอาทิตย์
และเกิดจากการแผ่รังสีดวงอาทิตย์ที่มีต่อดาวเทียม เมื่อ DoD วัดหาตำแหน่งดาวเทียมได้
ค่าตำแหน่งใหม่นี้ก็จะถูกส่งกลับเข้าไปบันทึกไว้ในดาวเทียมอีก
ดาวเทียมดวงนั้นก็จะส่งค่าแก้นี้พร้อมกับข่าวสารเวลาให้เครื่องรับ ข้อสำคัญคือ ดาวเทียม GPS ไม่เพียงแต่ส่งรหัส Pseudo
Random สำหรับการหาเวลาเท่านั้น
แต่ส่งข่าวสารข้อมูลเกี่ยวกับตำแหน่งของวงโคจรและค่าความสมบูรณ์ของระบบด้วยเครื่องรับ
GPS ใช้ข่าวสารข้อมูลนี้ควบคู่กับข้อมูลตารางดาวเทียมในเครื่องรับ
ในการคำนวณตำแหน่งที่ถูกต้องของดาวเทียม
ขั้นที่ 5
การช้าของสัญญาณในการเดินทางผ่านชั้นบรรยากาศ
เราทราบแล้วว่าในระบบ
GPS ได้จัดทำทุกส่วนให้ได้ความถูกต้อง เช่น
ใช้นาฬิกาอะตอมในดาวเทียม
และมีการวัดระยะเพิ่มขึ้นอีกหนึ่งระยะเพื่อใช้ขจัดความคลาดเคลื่อนของนาฬิกาในเครื่องรับ
และข้อความส่งจากดาวเทียมจะมีรายงานค่าปรับแก้วงโคจรทุกนาที
แต่ก็ยังมีสาเหตุของความคลาดเคลื่อนอีกสองสามประการที่กำจัดได้ยาก ค่าความคลาดเคลื่อนที่เกิดเห็นได้ชัดที่สุด
เกิดจากบรรยากาศชั้นไอโอโนสเฟียร์ ซึ่งเป็นชั้นของอนุภาคประจุไฟฟ้า
อยู่สูงจากโลกระหว่าง 80-120 ไมล์
อนุภาคเหล่านี้มีผลต่อความเร็วของแสง และความเร็วของสัญญาณวิทยุจากดาวเทียม
GPS เช่นกัน บางคนอาจคิดว่าความเร็วของแสงเป็นค่าคงที่อยู่ตลอดเวลา
แต่แสงเดินทางด้วยความเร็วคงที่เมื่ออยู่ในสูญญากาศ
ซึ่งอยู่ในชั้นอวกาศที่สูงมาก
แต่เมื่อแสงหรือสัญญาณวิทยุเดินทางผ่านตัวกลางที่มีความหนาแน่น เช่น
ชั้นที่มีอนุภาคประจุไฟฟ้าที่หนาหลายไมล์ย่อมทำให้ความเร็วลดลงบ้าง
และการที่คลื่นวิทยุเดินทางช้าลงนี้จะทำให้ระยะที่ได้ไม่ถูกต้อง
ถ้าหากว่าใช้ความเร็วของแสงคงที่
มีสองวิธีที่จะใช้ลดความคลาดเคลื่อนของระยะทางจากการที่สัญญาณเดินทางช้า
ทางที่หนึ่งเราต้องรู้ค่าความแปรเปลี่ยนเฉลี่ยรายวันตามสภาพบรรยากาศชั้นไอโอเฟียร์ความหนาแน่นปานกลางจึงสามารถนำมาเป็นค่าแก้กับทุกค่าที่วัดได้
ซึ่งได้ความถูกต้องสูงขึ้น แต่สภาพอากาศตามความเป็นจริงจะไม่คงที่ปานกลางตลอดเวลา
ดังนั้น การนำค่าเฉลี่ยมาใช้จะไม่ถูกต้องทั้งหมด อีกทางหนึ่งโดยการวัดหาค่าความแปรความเร็วของสัญญาณวิทยุ
โดยการวัดความเร็วสัมพัทธ์ของสัญญาณสองแบบที่ส่งมาจากดาวเทียมพร้อมกัน
วิธีการนี้เป็นแขนงวิชาฟิสิกส์ที่ผู้ศึกษาจำนวนน้อยมีแนวคิดพื้นฐานดังนี้
เมื่อแสงผ่านชั้นบรรยากาศไอโอโนสเฟียร์จะเดินทางช้าลงเป็นอัตราส่วนกลับกับความถี่ของสัญญาณยกกำลังสอง
ถ้าความถี่ยิ่งต่ำการเดินทางจะยิ่งช้าลง
วิธีนี้ใช้การเปรียบเทียบเวลาที่สัญญาณจาก GPS ที่มีความถี่ต่างกันเดินทางถึงเครื่องรับก็จะได้ค่าเวลาที่คลื่นเดินทางช้าไป
วิธีการแก้แบบนี้มักใช้กับเครื่อง GPS ที่มีความละเอียดถูกต้องสูง
ที่เรียกว่าเครื่องรับความถี่คู่ (Dual Frequency) จะช่วยขจัดค่าความคลาดเคลื่อนจากไอโอโนสเฟียร์ได้เป็นส่วนมาก
หลังจากเดินทางผ่านบรรยากาศชั้นไอโอโนสเฟียร์ซึ่งอยู่สูงกว่า
ก็ถึงชั้นบรรยากาศโลกที่มีละอองไอน้ำในอากาศซึ่งมีผลต่อความเร็วของสัญญาณเช่นกัน
ดังนั้นค่าความคลาดเคลื่อนจึงเกิดเช่นเดียวกับที่เกิดในบรรยากาศชั้นไอโอโนสเฟียร์
แต่ค่าคลาดเคลื่อนดังกล่าวยังไม่มีการปรับแก้ได้ซึ่งรวมอยู่ในค่าความคลาดเคลื่อนรวมของการบอกตำแหน่งโดยเครื่อง
GPS เป็นระยะประมาณ 25 เมตรเท่านั้น
ยังมีสาเหตุอื่นที่ทำให้เกิดความคลาดเคลื่อนได้อีก
ได้แก่ ความเที่ยงของนาฬิกา นาฬิกาอะตอมในดาวเทียมที่ว่าถูกต้องมากแล้ว
ก็ยังมีความคลาดเคลื่อนได้เหมือนกับ DoD ติดตาม
ความเที่ยงของนาฬิกาอะตอมและทำการปรับแก้แต่ก็ยังคงมีความคลาดเคลื่อนอยู่บ้างเล็กน้อย
ซึ่งอยู่ในความคลาดเคลื่อนรวมของเครื่อง GPS เช่นเดียวกัน
เครื่องรับที่ตั้งอยู่บนพื้นดินก็มีส่วนทำให้ผิดพลาดได้เช่นกัน
การคำนวณทางคณิตศาสตร์ในโปรแกรมของเครื่องทำให้ต้องเลือกตัดค่าสังเกตบางค่าทิ้ง
บางครั้งเมื่อถูกรบกวนด้วยคลื่นวิทยุ
อาจทำให้รหัส Psudo Random มีลักษณะผิดเพี้ยนทำให้โปรแกรมคอมพิวเตอร์ทำงานไม่ถูกต้อง
ความคลาดเคลื่อนอาจมีขนาดเล็กมากหรือขนาดใหญ่มากก็ได้
ค่าที่ใหญ่ก็สามารถรู้ได้ง่ายกว่าเพราะเห็นได้ชัด
แต่ถ้ามีค่าเล็กน้อยก็เป็นการยากที่จะหาได้พบ
ความคลาดเคลื่อนแบบนี้มีผลทำให้การบอกตำแหน่งผิดไปประมาณ 0.5 - 1เมตร
ความคลาดเคลื่อนอีกอย่างหนึ่งที่ได้เกิดจากดาวเทียมและเครื่องรับก็คือ
Multipath Error ความคลาดเคลื่อนจากจำนวนเส้นทางที่มีมากกว่า
1 เส้นทาง
เกิดจากการที่สัญญาณที่ส่งจากดาวเทียมตกกระทบไปยังวัตถุอื่นแล้วจึงสะท้อนเข้าเครื่องรับสัญญาณส่วนนี้ไม่เป็นสัญญาณจากดาวเทียมมีผลต่อการรับเหมือนกับที่เกิดกับการรับสัญญาณทีวี
เช่นเดียวกัน คือทำให้เกิดภาพพร่าซ้อนให้เห็นบนจอ GPS รุ่นใหม่ ใช้วิธีการประมวลผลที่ดีขึ้น
และการใช้เสาอากาศที่ป้องกันสัญญาณซ้อนได้ แต่ในบางครั้งถ้าเกิดรุนแรงมาก
ก็จะมีผลต่อการวัด GPSได้เหมือนกัน
สาเหตุของการเกิดการคลาดเคลื่อนทั้งหมดที่กล่าวมาเป็นผลทำให้การวัด
GPS ไม่แน่นอน ซึ่งความหมายว่า แทนที่จะกล่าวว่าของอยู่ห่างไป 10
ฟุต (3.5 เมตร) พอดี
ต้องกล่าวว่าของอยู่ห่างไป 10 ฟุต
บวกหรือลงเศษหนึ่งส่วนสิบนิ้ว
เป็นต้นหรือเปรียบเทียบให้เห็นได้อีกอย่างเช่นเหมือนกับเรากำลังใช้ไม้บรรทัดที่ปลายข้างที่ใช้วัดหักหรือลบไป
ทำให้ไม่สามารถบอกระยะที่แน่นอนที่เดียวได้
แต่ยังดีที่มีค่าความคลาดเคลื่อนทั้งหมดรวมกันแล้วก็จะมีไม่มาก ผลการใช้ GPS
จะบอกตำแหน่งได้ถูกต้องอยู่ในระยะไม่เกิน 25
เมตร และจะถูกต้องยิ่งขึ้นถ้าเครื่องรับคุณภาพดี
เพื่อให้ได้ค่าความถูกต้องที่ดีที่สุด
เครื่องรับที่ดีจะใช้หลักการของวิชาเรขาคณิต ซึ่งเรียกว่า Geometric
Dilution of Precision (GdoP)
GdoP เป็นค่าที่ชี้ให้เห็นความถูกต้องของตำแหน่งที่เครื่องรับ
GPS แสดงให้เห็นโดยค่าตำแหน่งที่คำนวณได้มาจากการหาระยะจากดาวเทียมหลายดวง
ลักษณะการประกอบรวมกลุ่มของดาวเทียมรูปเรขาคณิตหรือขนาดของมุมของดาวเทียมแต่ละดวงภายในกลุ่ม
จะมีส่วนทำให้ความคลาดเคลื่อนเพิ่มหรือน้อยลงได้
เหมือนกับคนเล่นสนุกเกอร์ที่ต้องเลือกลูกที่มีมุมแทงลูกให้ลงหลุมได้ง่าย
ซึ่งบางลูกอยู่ในมุมที่ดีแทงได้เต็มลูก บางลูกต้องแทงบางมากอาจผิดได้ ดูจากรูปจะเห็นว่าผลที่เกิดจาก
GdoP ระยะที่วัดได้อยู่บนเส้นวงกลมที่ดาวเทียมเป็นจุดศูนย์กลาง
และเนื่องจากระยะที่วัดได้มีขนาดไม่แน่นอนเส้นรอบวงจึงเป็นเส้นหนา เช่น
ระยะแทนที่จะเป็น 10,000 ไมล์ ก็จะเป็นรัศมีระยะ 10,000
+/- 0.001 ไมล์ (9,999.999-10,000.001 ไมล์)
ดังนั้นเวลาวาดเส้นรอบวงจะมีความกว้างเป็นแถบ ขนาด 0.002 ไมล์ ดังนั้น ตำแหน่ง X ที่เราเคยใช้เป็นแถบสี่เหลี่ยม
"X" หรืออาจพูดได้ว่าเนื่องจากผลลัพธ์ไม่แน่นอนตำแหน่งจึงไม่อยู่เป็นจุด
แต่จะอยู่ในที่หนึ่งที่ใดก็ได้ในแถบสี่เหลี่ยมนี้
ดังนั้น GDoP จะได้มาจากมุมระหว่างดาวเทียมที่จะทำให้เกิดรูปแถบสี่เหลี่ยมขึ้น
รูปสี่เหลี่ยมที่เกิดขึ้นอาจสวยงามดีได้ฉาก หรือยืดยาวและโตก็ได้
สรุปได้ว่าถ้าจะให้ได้ผลดีควรจะเลือกวัดจากกลุ่มดาวเทียมที่มุมระหว่างดาวเทียมมีขนาดโต
ด้วยเหตุนี้ในเครื่องรับ GPS จะมีโปรแกรมให้วิเคราะห์ตำแหน่งของดาวเทียมที่อยู่บนท้องฟ้า
และเลือกวัดจากชุดดาวเทียม 4 ดวง ที่มีค่า GdoP ดีที่สุด
ในเครื่องรับประเภทละเอียดก็จะเลือกวัดจากดาวเทียมที่เห็นในท้องฟ้าขณะนั้น
โดยวิธีนี้จะทำให้ค่าความคลาดเคลื่อนจาก GdoP เหลือน้อยที่สุด
รหัสสุ่มเทียม (Pseudo Random Code)
ท่านอาจมีข้อสงสัยว่าทำไมต้องใช้รหัส
Pseudo Random ทำไมไม่รับสัญญาณวิทยุธรรมดา เช่น ดาวเทียม TV
เป็นความจริงที่แนวคิดการสร้างรหัส Pseudo Random เป็นเรื่องปกปิดรู้เฉพาะไม่กี่คน แต่ระบบนี้ก็ช่วยให้ระบบ GPS ทำงานได้ผลและราคาไม่แพง ซึ่งต่อไปท่านพูดได้ว่า โดยการใช้รหัส Pseudo
Random จะทำให้ GPS กลายเป็นเครื่องใช้ทั่วไปที่ทุกคนใช้ได้
ก่อนหน้านี้ได้กล่าวถึงการทำงานโดยการใช้รหัส Pseudo Random มาแล้ว เครื่อง GPS สามารถหาเวลาที่ต่างกันระหว่างเครื่องรับกับดาวเทียมได้อย่างไร
แต่นั่นเป็นเพียงส่วนหนึ่งเท่านั้น
เหตุผลที่สร้าง Pseudo Random code ก็คือการประหยัด
จะเปรียบเทียบให้เห็นชัดต้องดูจากดาวเทียมทีวี
ซึ่งกระจายเสียงด้วยสัญญาณกำลังแรงดีมาก
แต่ส่วนเครื่องรับบนโลกยังต้องใช้จานรับดาวเทียมทรงโค้งกลมขนาดใหญ่ ลองนึกดูถ้า GPS
ต้องใช้จานรับแบบเดียวกันจะต้องมีความเทอะทะขนาดไหน และยิ่งกว่านั้นดาวเทียมทีวีหยุดนิ่งบนท้องฟ้า
แต่ดาวเทียม GPS โคจร
ซึ่งต้องรับโดยหมุนไปหาตำแหน่งดาวเทียมทั้ง 4 ดวง
จะต้องเป็นที่ยุ่งยากมากขึ้น
การใช้ Pseudo Random ช่วยให้ลดความจำเป็นอื่นทั้งหมดในการส่งข้อมูล
ดังนั้นการส่งสัญญาณ GPS จึงกินกำลังไฟน้อย และสัญญาณ GPS
อ่อนมากที่ไม่รับเอาสัญญาณวิทยุรบกวนอื่น
สัญญาณวิทยุรบกวนอื่นเกิดขึ้นเป็นคลื่นไม่เป็นรูปแบบ รหัส Pseudo Random ดูก็คล้ายคลื่นวิทยุรบกวนนี้มาก แต่มีข้อแตกต่างที่สำคัญคือ
เรารู้รูปร่างของคลื่นแล้ว
ถ้าหากว่านำเอาคลื่น Pseudo Random ไปเปรียบเข้ากับคลื่นวิทยุรบกวน
การเปรียบเทียบจะแบ่งคลื่นออกเป็นช่วงเวลา ตามรูปให้ส่วนที่เหมือนกันเป็น
"X"
จะเห็นตามตัวอย่างจากที่คลื่นไม่มีรูปแบบแบบสุ่มโอกาสที่เกิดขึ้นได้เหมือนกันประมาณครึ่งหนึ่ง
ถ้าเราให้ค่าคลื่นที่เหมือนกันเป็น 1
และที่ไม่เหมือนกันเป็น -1 จะพบว่าหลังจากเปรียบเทียบนาน ๆ
จะได้ค่าสุดท้ายเป็น 0
แต่ถ้า GPS เริ่มส่งสัญญาณเข้าเครื่องรับที่มีรูปแบบเหมือนกับ
Pseudo Random สัญญาณนี้ถึงแม้จะอ่อน
จะถูกทำให้แรงขึ้นแล้วนำมาเปรียบเทียบกันได้และถ้าเราเลื่อนรหัสที่ส่งจากดาวเทียม
เราก็จะได้คลื่นที่เข้ากันได้มากขึ้นและคะแนนก็จะมากขึ้นเรื่อยๆ
ยิ่งเปรียบเทียบนานตัวเลขจะเพิ่มมากขึ้นและจากที่ผลการเปรียบเทียบให้ผลตรงกันข้ามคลื่นวิทยุรบกวนซึ่งจะมีค่าเกือบศูนย์
ช่วงเวลานี้จะส่งกำลังขยายให้แก่สัญญาณดาวเทียมมากขึ้นเป็นพันเท่า
รหัส Pseudo Random ช่วยให้เราจับสัญญาณที่อ่อนมากได้
ซึ่งหมายถึงในเครื่อง GPS ไม่ต้องใช้ไฟมาก
และมีวิธีการเพิ่มความแรงสัญญาณ เครื่องรับจึงใช้เสาอากาศขนาดเล็กได้
ทำไมดาวเทียมอื่นไม่ใช้วิธีการนี้
ดาวเทียมทั่วไปต้องมีจานรับขนาดใหญ่มากติดตามบ้านที่เห็นทั่วไป ทั้งนี้เพราะสัญญาณ
GPS มีข้อมูลน้อย ต้องการเพียงให้หาเวลาได้เท่านั้น
ตรงกันข้ามกับสัญญาณทีวีที่ข้อมูลมาก
หรือถ้าพูดเชิงวิชาการก็ต้องว่าเป็นสัญญาณที่มีแถบกว้างสูงมาก หลักการของ Pseudo
Random Code มีการทำงานในการเปรียบเทียบสัญญาณเหมือนกันหลาย ๆ รอบ
การเปรียบเทียบนี้จะทำให้ช้าเมื่อเทียบกับแบบที่ต้องใช้สัญญาณทีวี ดังนั้นวิธีการ GPS
จึงนำมาใช้กับดาวเทียม TV ไม่ได้
ยังมีเหตุผลอื่นอีกสองข้อของการใช้รหัส Pseudo Random ข้อหนึ่งคือในเวลาสงคราม DoD สามารถควบคุมไม่ให้ศัตรูใช้ระบบนี้ได้
ถึงแม้เวลาปกติ DoD ยังคงเป็นผู้พิเศษในการควบคุมระบบอยู่ดี
รหัส Pseudo Random มี 2 แบบ คือ C/A
code และ P-code ดังนั้น บางคนจึงคิดว่า C/A
code นี่ถูกต้องน้อยกว่า P-code รหัส P-code
เก็บไว้ใช้เฉพาะทางราชการทหารและ P-code นี้จะไม่เกิดการติดขัด
DoD ยังสามารถลดความถูกต้องของ C/A code ได้
การทำโดยมาตรการ Selective Availibility หรือ S/A วิธี S/A ที่สำคัญก็คือการทำให้นาฬิกาดาวเทียมบอกเวลาคลาดเคลื่อน
ถ้าใครนำเวลานี้ไปใช้ก็จะได้ตำแหน่งที่มีความคลาดเคลื่อนมาก
ประโยชน์อีกข้อของ Pseudo Random คือ
ดาวเทียมทุกดวงสามารถใช้คลื่นความถี่เดี่ยวกันได้ โดยไม่เกิดการรบกวนต่อกัน
ดาวเทียมแต่ละดวงจะมี Pseudo Random code เป็นของเฉพาะตัว
ดังนั้นเวลาเครื่องรับนำรหัสมาใช้ต้องให้ถูกตามหมายเลขดาวเทียมนั้นด้วย
การวัดด้วยวิธีอนุพันธ์ (Differential) คือ
สุดยอดของความถูกต้อง
GPS เป็นเครื่องมือทำหน้าที่แสดงพิกัดบนโลกเราที่ถูกต้องที่สุดที่เคยมีมา
แต่ยังมีวิธีการทำให้ถูกต้องได้ยิ่งขึ้นอีกโดยการใช้วิธีที่เรียกว่า
"Differential GPS" แบบนี้จะทำให้ได้ความถูกต้องที่ดีกว่าหนึ่งเมตร
และเป็นการนำเครื่อง GPS ไปใช้ประโยชน์อย่างอื่นได้อีกด้วย
GPS สำหรับการสำรวจรังวัด ช่างสำรวจได้ใช้ GPS มาเป็นเวลาหลายปีแล้วสำหรับการคำนวณหาตำแหน่งที่ถูกต้องเป็นเซนติเมตร
วิธีการนี้เป็นส่วนที่ใช้วิธี Differential การวัดให้ความ
ถูกต้องละเอียดมากนี้ จะต้องตั้งเครื่องเก็บข้อมูล GPS ที่สถานีเป็นเวลาอย่างน้อย
15 นาที จะต้องรู้ค่าจุดอ้างอิงหรือ Reference Point
และใช้ซอฟแวร์คำนวณงาน การใช้ GPS ทำงานสะดวกและประหยัดช่างสำรวจคนเดียวสามารถทำงานที่ต้องใช้คนหลาย
ๆ คน ได้ในเวลาเพียงเล็กน้อยเมื่อเทียบกับการรังวัดแบบเดิม
ไม่ต้องปีนเขาสูงที่เป็นที่ตั้งของหมุดในโครงข่ายสามเหลี่ยมเพื่อการส่องกล้องเล็งแนวให้ได้ระยะห่างไกล
ๆ อีกต่อไป วิธีการรังวัดด้วย
GPS แบบใหม่ ที่เรียกว่า Kinematics ซึ่งอยู่ในระหว่างการพัฒนา
จะทำให้การทำงานเป็นแบบอัตโนมัติมากขึ้น
ช่างสำรวจต้องทำเพียงเดินไปยังจุดที่ต้องการวัด แล้วกดปุ่มเท่านั้น เครื่อง GPS
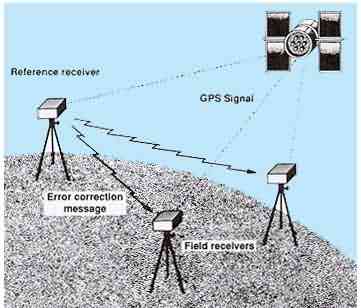
ก็จะบันทึกตำแหน่งที่วัดที่แน่นอนได้ เคล็ดลับของการที่ให้ความถูกต้องสูงนี้มีพื้นฐานมาจากแนวคิดที่เราวางเครื่อง
GPS เครื่องหนึ่งไว้ที่จุดที่รู้ตำแหน่งบนโลกแล้ว
(Reference Point) เราสามารถที่จะหาค่าความคลาดเคลื่อนของค่าตำแหน่งที่ได้จากดาวเทียมได้แน่นอน
ดังนั้นที่จุดนี้ GPS ทำหน้าที่เหมือนจุดอ้างอิง
และสามารถใช้ค่าปรับแก้เดียวกันนี้กับเครื่อง GPS ตัวอื่นที่อยู่บริเวณเดียวกันได้และสามารถนำไปใช้เป็นค่าแก้สำหรับการคำนวณตำแหน่งใช้เช่นเดียวกัน
แนวคิดนี้ใช้การได้เพราะดาวเทียมอยู่สูงมากที่ค่าความคลาดเคลื่อนที่รับได้ในเครื่องรับเครื่องหนึ่งจะมีค่าเท่ากับค่าความคลาดเคลื่อนในเครื่องอื่นที่อยุ่บริเวณเดียวกัน
ทั้งนี้เนื่องจากสัญญาณของดาวเทียมเป็นสัญญาณที่ธรรมดา
ค่าตัวคงที่ตัวเดียวก็จะมีผลรวมของค่าคลาดเคลื่อนที่เกิดสาเหตุอื่นไม่ว่าเกิดจากนาฬิกาเครื่องรับ
นาฬิกาดาวเทียม ตำแหน่งดาวเทียมหรือการที่สัญญาณเดินทางเข้าไปในชั้นบรรยากาศ
รายงานผลคลาดเคลื่อนของเครื่องที่จุดอ้างอิงถูกส่งไปยังเครื่องรับอื่นได้
2 รูปแบบ คือ
วิธีการหนึ่งก็คือการส่งด้วยวิธีผ่านวิทยุหรือระบบสื่อสารไปที่เครื่องรับ
แล้วให้คอมพิวเตอร์ประมวลตามความคลาดเคลื่อนที่จุดอ้างอิง
เครื่องนั้นก็จะคำนวณหาตำแหน่งที่ถูกต้องได้
อีกวิธีหนึ่งโดยการเปลี่ยนเครื่องที่จุดอ้างอิงให้เป็นเหมือนดาวเทียมที่ส่งสัญญาณออกได้แบบเดียวกับดาวเทียมโดยการใช้
Pseudo Random Code แต่จะมีข้อมูลค่าแก้ในข่าวสารด้วย
เครื่องรับที่จุดอื่นก็จะรับคลื่นจากดาวเทียมนี้ด้วยช่องรับสัญญาณที่ว่างอยู่
และนำไปแก้โดยวิธีเดียวกับที่ใช้แก้ค่าของอีฟิเมอริสที่รับได้จากดาวเทียมจริง
ระบบนี้จะไม่มีข้อเสียในเรื่องสัญญาณรบกวน
ซึ่งมีสภาวะการณ์เช่นเดียวกับที่การรับสัญญาณจากดาวเทียมจริง
|
|
|
รูปที่ 12
แสดงการวัดด้วยวิธี Diffeential |
|
ประเภทเครื่องรับสัญญาณ
GPS |
เครื่องรับแบ่งออกได้เป็น
2 กลุ่ม คือ เครื่องประเภทที่สามารถรับดาวเทียมได้ 4 ดวง หรือมากกว่าได้พร้อมกันทีเดียว กับเครื่องที่มีการรับดาวเทียมโดยการเรียงลำดับ
และแต่ละกลุ่มยังแบ่งย่อยได้อีกคือ
1. เครื่องรับแบบเรียงลำดับสัญญาณดาวเทียม
ปกติเครื่องรับ GPS จะต้องมีข้อมูลจากดาวเทียมอย่างน้อย
4 ดวง จึงสามารถคำนวณหาตำแหน่งที่ได้
เครื่องรับที่ใช้เรียงลำดับใช้ช่องรับ
สัญญาณเพียงช่องเดียว
รับข้อมูลจากดาวเทียมดวงหนึ่งระยะหนึ่งแล้วเปลี่ยนไปยังอีกดวงหนึ่ง
เครื่องประเภทนี้จะมีแผงวงจรเล็ก ดังนั้นจึงมีราคาถูกกว่าและใช้กำลังน้อยกว่า
ข้อเสียของการเรียงลำดับสัญญาณอาจเกิดขาดตอนและทำให้มีผลต่อความถูกต้องของผลที่ได้
ในกลุ่มนี้จะมี "Starved Power" Single-Channel Receivers, Two
Chanel Receivers, และเครื่องแบบเก่า Fast-Multiplexing
Single Receivers
1.1 Starved-Power Single
Receivers เครื่องแบบนี้ออกแบบให้พกพาได้และสามารถ
ทำงานได้ด้วยถ่านไฟฉายขนาดเล็ก การจำกัดการใช้กระแสไฟโดยให้ปิดการทำงานตัวเองโดยอัตโนมัติ
เมื่อแสดงตำแหน่งครั้งสองครั้งใน 1 นาที เหมาะสำหรับใช้งานบอกตำแหน่งส่วนตัว เช่น
นักไต่เขาหรือแล่นเรือในเวลากลางวัน โดยไม่ต้องมีถ่านไฟฉายหลายก้อน
นับว่าเป็นเครื่องที่ใช้การได้ สามารถให้ความถูกต้องที่ดีกว่าระบบ
LORAN และทำงานได้ทุกที่บนโลก
ข้อเสีย คือ ความถูกต้องของ GPS ไม่ดี
และต่อเชื่อมกับอุปกรณ์อื่นไม่ได้ และไม่ สามารถใช้วัดหาความเร็วได้
การที่หาความเร็วไม่ได้ เนื่องจากต้องปิดเครื่องเองในระหว่างการวัด เพราะว่าเครื่องใช้แผงวงจรนาฬิกาที่กินไฟน้อย (นาฬิกาจะต้องเดินอยู่ตลอดเวลา)
นาฬิกาที่ใช้จึงไม่ให้ความถูกต้องเท่าที่ควร
1.2 Single Channel Receivers
เหมือนกับแบบค่าข้างบน
เป็นเครื่องรับสัญญาณห้องเดียวใช้ทำงานหาระยะจากดาวเทียมทุกดวง
แต่ที่ไม่เหมือนคือเครื่องรับช่องเดียวแบบมาตรฐานไม่จำกัดที่กำลังไฟ
ดังนั้นจึงทำการรับต่อเนื่องได้ มีผลทำให้ความถูกต้องสูงกว่า
และใช้วัดหาความเร็วได้ จากที่มีเพียงช่องเดียวที่ต้องใช้ทั้งการรับข้อมูลดาวเทียมและคำนวณหาระยะ
จึงไม่สามารถหาตำแหน่งต่อเนื่องได้
ยิ่งกว่านั้นตามเหตุผลของวิชาการ ความไม่เที่ยงตรงของนาฬิกามีผลโดยตรงต่อความถูกต้องของการวัดหาความเร็ว
เครื่องราคาถูกบางชนิดใช้นาฬิการาคาถูกเพื่อให้ราคาเครื่องลดลง
จึงทำให้ค่าความเร็วที่แสดงมาเชื่อถือไม่ได้
1.3 Fast-Multiplexing Single
Receivers เครื่องประเภทนี้เหมือนกับเครื่องทั้งสองประเภทข้างบนซึ่งรับช้า
แต่เครื่องรับนี้สามารถเปลี่ยนดาวเทียมได้เร็วกว่ามาก ข้อดี คือ
สามารถทำการวัดได้ในขณะที่กำลังรับข้อมูลจากดาวเทียม
ดังนั้นเครื่องทำงานได้อย่างต่อเนื่อง
และการที่มีนาฬิกาไม่เที่ยงจึงมีผลต่อเครื่องประเภทนี้น้อย
เครื่องแบบนี้ต้องการใช้แผงวงจรที่ค่อนข้างซับซ้อนและราคาพอ ๆ
กับเครื่องแบบสองช่องรับสัญญาณที่ใช้เครื่องซึ่งให้ความถูกต้องสูงกว่าและมีลักษณะการยืดหยุ่นการใช้งานได้ดีกว่า
1.4
Two-Channel Sequencing Receivers การเพิ่มช่องรับสัญญาณขึ้นอีกหนึ่งช่องช่วยให้เครื่องเพิ่มขีดความสามารถขึ้นอย่างเห็นได้ชัด
ข้อหนึ่งความแรงสัญญาณ Signal-to-Noise เป็นสองเท่าทันที
หมายถึงสามารถจับสัญญาณภายใต้สภาวะที่ไม่ดีได้และสามารถรับดาวเทียมดวงที่อยู่ระดับต่ำใกล้เส้นขอบฟ้าได้
จากการที่ช่องหนึ่งสามารถรับข้อมูลตำแหน่งอย่างต่อเนื่องได้ในขณะที่อีกช่องหนึ่งค้นหาดาวเทียมดวงต่อไป
เครื่องแบบสองช่องนี้จะทำงานแบบนำร่องได้โดยไม่ต้องมีการขาดตอน
และความเร็วก็จะมีค่าที่ถูกต้องขึ้น
ความจริงเครื่องรับสองช่องที่มีคุณภาพดีก็สามารถใช้คำนวณหาและตัดค่าที่เวลาของนาฬิกาเครื่องรับไม่ดีทิ้งเพื่อใช้ในการวัดหา
ความเร็ว ข้อเสียของเครื่องแบบสองช่องคือ
มีราคาสูงกว่าและกินไฟมากกว่า ในเครื่องรับรุ่นใหม่บ้างก็มักใช้แบบ IC ที่สามารถเพิ่มช่องรับสัญญาณที่สองในราคาที่ไม่ต่างกับราคานาฬิกา
ดี ๆ หนึ่งเรือน แต่กระนั้นเครื่องแบบสองช่องยังมีราคาแพงกว่าเครื่องแบบช่องเดียวมาก
ทั้งนี้ เนื่องจากผู้ใช้สองช่องมักต้องการความถูกต้อง
และต้องการเครื่องที่แข็งแรงและสามารถควบคุมสังเกตการณ์แสดงผลที่ดีกว่า
2. Continuous Receivers ได้แก่ เครื่องรับที่สามารถรับสัญญาณดาวเทียมพร้อมกันได้ตั้งแต่ 4 ดวงขึ้นไป และสามารถแสดงผลค่าตำแหน่งและความเร็วได้ทันที
การรับดาวเทียมได้ทั้ง 4 ดวง
พร้อมกับที่มีค่าในการวัดหาในขณะที่มีการเปลี่ยนตำแหน่งรวดเร็วหรือต้องการความถูกต้องสูง
ดังนั้นเครื่องแบบนี้จึงนำมาใช้ในงานรังวัดและทางด้านวิทยุ
ซึ่งจะพบว่าจะมีช่องรับสัญญาณทั้ง 4,5,8 10 และ 12 ช่อง นอกจากข้อดีที่ใช้วัดตำแหน่งอย่างต่อเนื่องได้แล้ว
เครื่องรับ GPS แบบหลายช่องสามารถช่วยขจัดปัญหา GDoP ได้อีกด้วย คือ แทนที่จะรับดาวเทียม 4 ดวงใดก็ได้
จะคำนวณหาค่า GDoP ดาวเทียม 4 ดวงของกลุ่มดาวเทียมที่ขึ้นอยู่
และทำการวัดจากดาวกลุ่มที่มีค่า GDoP ต่ำสุด
เครื่องรับ 4 ช่องสัญญาณ สามารถให้ค่า Signal
to Noise Ratio เพิ่มขึ้นเป็นสองเท่าของเครื่อง 2 ช่อง และเป็นสี่เท่าของเครื่องรับแบบช่องเดียว
และโดยการเปรียบเทียบค่าการรับของแต่ละช่อง
เครื่องสามารถปรับตั้งค่าพิกัดเทียมระหว่างช่องรับสัญญาณ
ซึ่งช่วยทำให้การวัดมีความถูกต้องดีขึ้น นอกเหนือจากข้อดี
ข้อเสียที่กล่าวแล้ว ยังมีข้ออื่นมาพิจารณาอีกคือ
มีเครื่องแบบใหม่สามารถได้ค่าความถูกต้องสูงมาก โดยการใช้ทั้งรหัส Pseudo
Random ที่กล่าวมาแล้ว และใช้ความถี่ของคลื่นพาห์ (Carrier
Frequency) ซึ่งทำให้เครื่องรับทำงานมีความเที่ยงสูง ที่รหัส Pseudo
Random ไม่สามารถให้ได้ และใช้ในการวัดหาเวลาได้แม่นยำมากขึ้น
ซึ่งช่วยในการบอกตำแหน่งได้ดีขึ้นด้วย
และมีบางเครื่องที่ไม่ต้องใส่ค่าประมาณตำแหน่งและเวลา
โดยประมาณให้เครื่องก่อนทำการวัด
เครื่องรับแบบนี้ใช้ตัวเองใส่ค่าเริ่มตำแหน่งได้โดยตัวมันเอง
ข้อที่ควรพิจารณา คือ
การต่อเชื่อมกับอุปกรณ์อื่นและความสะดวกบางเครื่องแสดงได้เฉพาะพิกัดภูมิศาสตร์
บางเครื่องไม่สามารถต่อเข้ากับเครื่องมืออื่นหรือคอมพิวเตอร์ขนาดเล็ก (PC) ได้ และข้อใหญ่ที่ต้องพิจารณา
ความแข็งแรงทนทานถ้าต้องใช้เครื่องทำงานในพื้นที่ทะเล หรือในพื้นที่ป่าเขา
การใช้ไฟและความร้อนที่เกิดขึ้นเป็นตัวชี้สำคัญที่จะต้องเอาใจใส่
ทางสถิติแสดงให้เห็นว่าอัตราของค่าความผิดพลาดจะเพิ่มเป็นสองเท่าของความร้อนในเครื่องเพิ่มทุก
7 องศาฟาเรนไฮต์ เครื่องรับรุ่นใหม่ปัจจุบันได้เพิ่มคุณค่าให้แก่เครื่องรับ
GPS อีกหลายประการ เช่น ใช้การประมวลผลที่ซับซ้อน
แสดงผลด้วยจอภาพรายละเอียด เครื่องรับ GPS อาจแสดงจุดตำแหน่งบนแผนที่ที่ได้วาดไว้แล้วให้เห็นทันที
|
อ้างอิง |
Website
http://www.utexas.edu/depts/grg/gcraft/notes/gps/gps.html