
Home Page for Ken McCormack ECE578
Interests
Not so coincidentally, one of my interests/hobbies is building robots. I have had some success in the last year or so. It all started when I bought a RC sailplane. It has a 6 foot wingspan and a electric motor to get it up to altitude. It was lots of fun to fly, but difficult for a beginner. I just couldn’t get it to soar on the thermals. I thought to myself., "Why can’t a computer fly this for me and optimize the flight path for altitude?" I started thinking about a simple telemetry system but had to drop it simply because it would weight too much and put the plane out of the operational region.. So I build another RC plane kit specifically to carry the weight. It would carry the micro computer, DSP, sensors, camera and such. Auto pilot for my plane was just a few months away when a friend pointed out that one big crash or "loss of control event" and all my work would be rubble on the tarmac or be flying south and last seen in Albany.
About this time (1999) I attended the Seattle Robotics Society
http://www.seattlerobotics.org/ show and have been hooked ever since. I saw the competitions of the autonomous robots and decided that this was the safer way to build robots. When I get confident enough with land robots I might go back in the air.Class Work
Artificial intelligence and Mobile Robots -- Kortenkamp
 This book is a compilation of case studies from universities. I found the book extremely useful. Rate it a 5/5.
This book is a compilation of case studies from universities. I found the book extremely useful. Rate it a 5/5.
There are three sections of the book—
Mapping and Navigation
Vision for Mobile Robots,
Mobile Robot Architectures

Computational principles of mobile robotics. – Gregory Dudek
This is a very good book on mobile robots. It covers the control and mapping, pose maintenance issues. Does not describe how to build robots. This is a very useful book and a good candidate for the textbook for the course in the future. It includes problems at the end of each chapter.
Favorite links
Check out this little PIC controller.
http://www.oopic.com/ The OOPic is a blast to program. I have never been able to produce as many applications so fast and easily with any other PIC. The tools are stable, free, and the HW is relatively inexpensive. More importantly the OOPic has a library of code for the most common robotic sensors.I buy most of my stuff from Acroname.
http://www.acroname.com/ I have had great service from them.Checkout the competitions for the upcoming Robothon in Seattle. Anyone want to enter a contest as a project?
ROBOTS I’ve built
Currently unnamed – maybe Groucho.
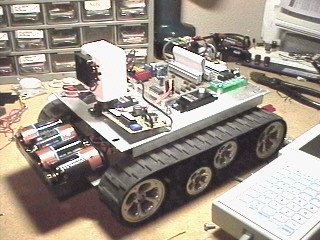
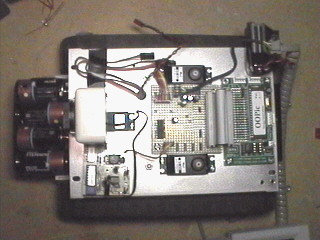
Mechanical
Things my robot needs
Intelligence. Intelligence…. Currently it just avoids the walls and can find the dark/light. Very primitive actions. I need to understand the complexities of mapping and pose maintenance. The robot was designed to be somewhat of a household pet. My wife is extremely allergic to animals – so no live pets allowed. If the robot would navigate my ever changing household, do some tricks, say some intelligent things once in awhile that would be great.
Where I Work
Currently I am employed at Oresis Communications, Inc.(
http://www.oresis.com/) This is a start-up company in Beaverton. I specialize in programming the network processors which do the real-time data parsing for the switch. Lots of exciting opportunities. Anyone need a job?Things I have done in the past
Certainly the most enjoyable project I have been on was partially developing an HDTV MPEG encoder for Tektronix
http://www.tek.com/. In this project we were tasked with doing a technology survey of DSP processors capable of doing real-time HDTV video encoding. No small task believe me. The project was cancelled after 18 months of research effort. The best processor we determined was the MAP-CA processor developed by Equator (http://www.equator.com/. This processor is an excellent candidate for video processing engine and very easy to program!!!Other projects in my 8 years at Tektronix included digital audio codecs, audio mixers and video/audio disk recorders. I use a mixture of TI, Motorola and Analog Devices DSPs. My first year at Tek was spent as an intern writing digital demodulation software for a spectrum analyzer using the Motorala 56k DSP. This processor is still worthwhile for audio applications.
Education
MSEE Oregon Graduate Institute (in progress)
BSEE Washington State University
BS Physics Central Washington University