| Areas Of Interests | |||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||
| Research Summary - (GPS/INS Integration) | |||||||||||||||||||||||||||||||
GPS/INS integration is providing reliable solution in Military, Aviation, Marine and Land surveying applications. Inertial sensors used in the GPS/INS fusion are still very expensive to be used for civil applications. The research endeavors to integrate a low cost inertial sensor with single frequency GPS receiver to get land vehicle mapping solution within an accuracy range of sub meter. Matlab/Simulink is used as the processing environment. An INS data processing model in simulink has been created. My masters thesis is devoted to the INS data processing. The simulink INS data processing model is provided in zip format for download. The integration of GPS and INS is being studied by the use of Kalman Filtering. Anyone, interested in further collaboration of this research, is welcome to write an email.
|
|||||||||||||||||||||||||||||||
| Master's Research | |||||||||||||||||||||||||||||||
INERTIAL NAVIGATION SYSTEM (INS) DATA PROCESSING FOR LAND VEHICLE MAPPING |
|||||||||||||||||||||||||||||||
Abstract Locating the positions and mapping the spatial information is of critical significance in the field of Precision Farming. Global Positioning System (GPS) is the main tool being utilized for this purpose but it is dependent on the satellite signals, unfortunately these signals may get lost due to the blockage by canopy of the orchards. Inertial Navigation System (INS) can address this problem and support the non-availability of GPS signal for a short time. INS is capable of individually calculating the vehicle's position without any external references. However, its high cost and time dependent errors are its major drawbacks. The research focuses on the mapping solution by INS only so that it can provide solution in the absence of GPS signal. Low cost inertial sensor (Xbow RGA300CA) was used for data collection and processing. Data Processing was done in Matlab/Simulink environment. A Simulink processing model is presented in detail to give an insight of the Strapdown INS Mechanization. Low pass filter and wavelet denoising model was used to assess the margin of improvement for noise filtering. Accurate GPS information was used as a reference of comparison. The model was tested in the lab as well as in the field for its validity. Before going to the field the Inertial sensor was tested in the lab for yaw rate drift and for stationary drift. For kinematic field testing, inertial sensor with GPS was mounted on the vehicle to get the positions for straight trajectories up to 100 meters. Results obtained are presented in detail. A gradual error growth was observed in the INS data and the sensor was found to be stable for short term only. |
|||||||||||||||||||||||||||||||
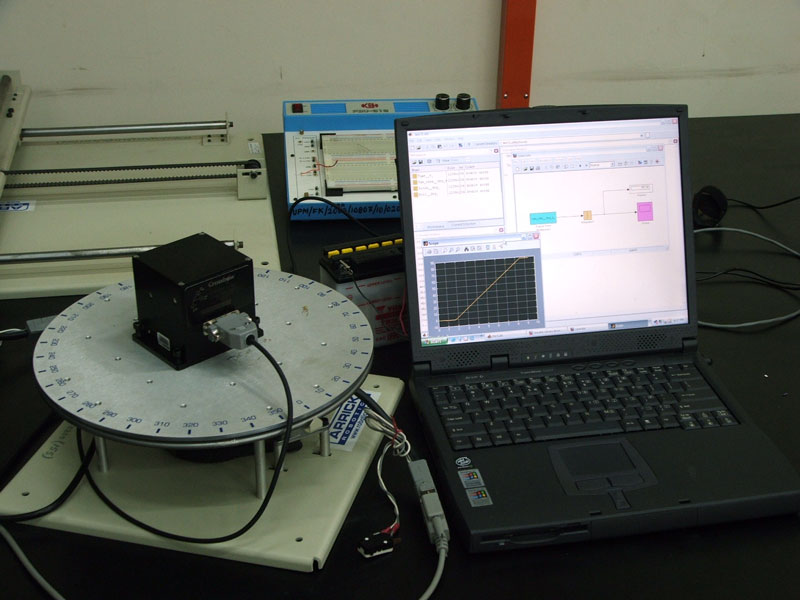
| Research Pictures | |||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||
| My Publications | |||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||