| L'…LECTRONIQUE DE L'HAMSTER FOU |
 |
 |
| Carte du BS2P40 |
| Microprocesseur BS2P40. Il y a deux unitťs comme celle ci sur notre robot, chacune ayant 32 I/O. La cadence de l'horloge est de 20 MHz Turbo (la vitesse rťelle est de 12000 instructions/seconde), avec une memoire de 16Kbytes. Ce processeur se programme dans un langage similaire au Basic. |
 |
| Emeteur/rťcepteur RF 433Mhz. Deux de ces modules assurent le lien entre l'ordinateur (l'interface opťrateur) et le robot. La communication de fait sťrie, ŗ 9600 baud. La distance maximum de transmission/rťception est de 250 pieds. |
 |
| Camťra numťrique CMU. Elle reconnait les couleurs et permet au robot de suivre des objets en mouvement ou de les trier en fonction de leur couleur. Rťsolution: 80 x 143 (pas vraiment un Kodak, mais excellente pour notre application :-) |
 |
| Capteur de distance ultrasonique, dťtecte les objets dans un rayon de 3m. On a ťquipť notre robot de 6 dťtecteurs de ce genre, rťpartis tout autour de la base. |
 |
 |
| Processeur Basic Stamp 2, moins puissant que le BS2P40, mais assez intťressant. Il se trouve du cŰtť de l'ordinateur. |
| Carte du BS2. |
 |
| Affichage ŗ cristaux liquides; installť sur le robot, ce module va afficher des informations comme la vitesse, la distance par rapport aux objets environnants, la temperature, etc. |
 |
| Module de vocal. Il s'agit de la voix du robot. |
 |
| AcceleromŤtre. Cette petite composante permet au robot de dťtecter les shocs ou les vibrations violentes. Ainsi, on ne risque pas de blesser personne (ou au moins, on va le savoir si on frappe quelqu'un). |
 |
| Encodeurs optiques incrťmentaux. Ces capteurs sont placťs sur les axes des roues, afin de connaÓtre la position du robot en temps rťel. Pour un tour complet, un encodeur sort 1000 impulsions. En supposant qu'un tour de roue equivaut ŗ 3pi (la circonfťrence de la roue), il suffit de compter 1000 impulsions (un tour) pour savoir qu'on a parcouru 3pi. |
 |
| Module suiveur de ligne. Permet au robot de suivre une ligne de guidage. Les robots mobiles dans les mines utilisent ce principe pour se diriger dans les gallťries. |
 |
| Servomoteur Parallax. La camťra est fixťe sur un moteur de ce genre afin de pouvoir la bouger sur un plus grand angle. C'est le cou de la camťra. |
 |
| Transistor MOSFET de puissance. «a en prend 8 (4 par moteur). Ces composantes sont disposťes dans une structure qu'on appelle "pont en H". |
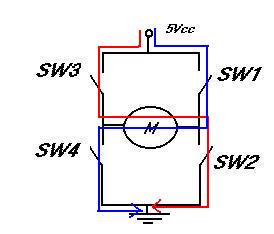 |
| La figure ŗ gauche nous montre le principe de fonctionnement d'un pont en H (les transistors sont remplacťs par des interrupteurs pour faciliter la comprehension). Lorsque SW3 et SW2 sont fermťs le courant suit le chemin en rouge et le moteur tourne dans un sens. Lorsqu'on ouvre la paire SW3-SW2 et qu'on ferme la paire SW1-SW4, le courant prend le chemin bleu et le moteur tourne dans l'autre sens. |
| Notre principal fournisseur de matťriel ťlectronique est Parallax (une firme qui vend des produits liťs ŗ la robotique www.parallax.com ). Les autres fournisseurs sont Omron (pour les encodeurs) et Digikey. |
 |