 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
Electrical Designes: To sense the sorroundings our robot has visual, auditory (not yet complete) and structural sensors. Structural sensors are rotational sensors for different joints and gyroscope for measuring tilt of the robot at any side. These rotational sensors are made of optocouplers and simple optical encoder disk. The visual sensor is 1.3 MegaPixel webcam which is connected through USB port to the laptop computer. To reduce external circuit complexity most of the circuits are internally calculated and simple interfacing circuitry is used for external communication terough PC parallel port to external sensor circuits, valves and pump control circuits. |
|
|
|
 |
|
|
|
 |
|
|
|
|
|
Fig: Three 6V 4.2AH battery will serve as main power supply for the entire robot. Each Battery will output 14A initially. Hence, One battery will be enough for running the pump. Another battery will be used to run the valves and the remaining one will run the circuits. |
|
|
Fig: Optocoupler used with optical encoder will serve as rotational sensors. The outputs of each optocouplers will be directly connected to interfacing circuits. |
|
|
|
|
|
 |
|
|
|
|
|
|
Fig: Optical encoder disk which can amount of rotation as well as direction of rotation. Two optocoupler will be required per disk to get the direction. |
|
|
|
|
|
 |
|
|
|
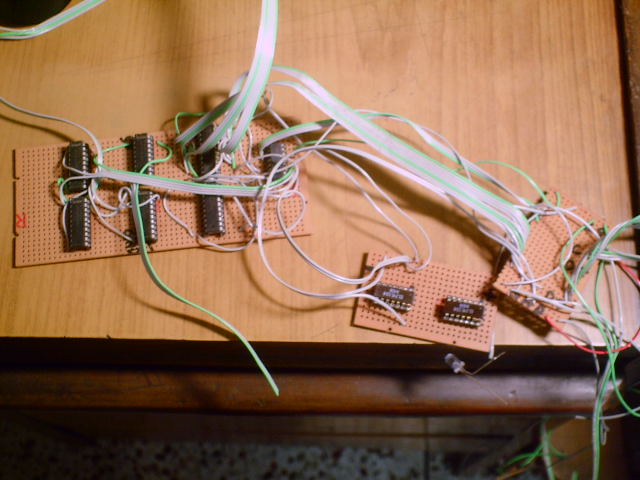
Fig: Simple interfacing circuits consisting of 74 ls 373, 74 ls 04, 74 ls 138 and ULN 2803 ICs. They will establish communication through the PCs parallel port to the external elements like, pump, stepper motor, solenoid valves, sensors etc. |
|
|
|