Prev Up Top Next Contents
4.E Trasformazioni geodetiche
Una trasformazione geodetica e` una operazione matematica che permette di
passare dalle coordinate in un sistema di riferimento a quelle in un altro,
all'interno dello stesso datum, o fra datum diversi.
In geodesia spesso si hanno le coordinate di punti in un TRF,
realizzazione di un TRS,
e bisogna trovare le coordinate in un secondo TRF, realizzazione di
un altro TRS. Poiche` i TRF sono esprimibili solo con una certa accuratezza,
anche le trasformazioni sono approssimate [
445] .
Le trasformazioni fra differenti datum non sono esprimibili analiticamente,
ma solo mediante approssimazioni in serie.
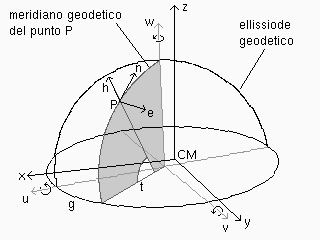
Fig. 201. Ellissoide geodetico
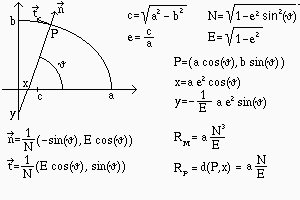
Fig. 202. Sferoide
I punti in un sistema di riferimento basato su un ellissoide
possono essere espressi in coordinate cartesiane (u,v,w) oppure
in coordinate geografiche (latitudine, longitudine e altezza).
Il sistema di riferimento cartesiano (u,v,w) dell'ellissoide
risulta ruotato e traslato rispetto
al sistema di riferimento geocentrico cartesiano (x,y,z) (con asse
z
lungo l'asse di rotazione della terra), e possibilmente con un fattore
di scala (modulo) [
446] .
La coordinata
w e` diretta lungo l'asse di rotazione dell'ellissoide,
la
u e` a 90 gradi nel piano di riferimento (passa per il punto
con latitudine e longitudine 0) e la
v e` messa
in modo da formare una terna destrorsa.
La relazione fra le coordinate (x,y,z) e (u,v,w) risulta
| x | | dx | | 1 dw -dv | | u |
| y | = | dy | + (1+ds) | -dw 1 du | | v |
| z | | dz | | dv -du 1 | | w |
dove (
dx, dy, dz) sono le coordinate dell'origine dell'ellissoide
nel sistema (x,y,z),
ds e` il modulo di scala, e
du, dv, dw sono le rotazioni attorno a u,v,w risp. per portare
questi assi a coincidere con gli assi x,y,z. La rotazione da u,v,w a
x,y,z e` approssimata con le rotazioni infinitesime poiche`, in genere,
gli angoli di rotazione sono molto piccoli.
Altrimenti si deve considerare le rotazioni
Rx,
Ry e
Rz
nell'ordine.
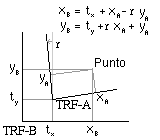
Fig. 203. Trasformazione di Helmert
Questa trasformazione e` detta trasformazione di Helmert.
Essa e` determinata da sette parametri: le tre traslazioni, i tre angoli
di rotazione e la correzione di scala.
La figura sopra mostra la trasformazione
semplificata nel piano (e senza correzione di scala).
La relazione fra le coordinate cartesiane (u,v,w) e
latitudine
t, longitudine
g e altezza
h e`
u = (N + h) cos(t) cos(g)
v = (N + h) cos(t) sin(g)
w = (N E^2 + h) sin(t)
dove i parametri dell'ellissoide sono
- a = semiasse maggiore
- e = eccentricita`
- E2 = 1 - e2
- e'2 = e2 / E2, seconda eccentricita`
- e2 = 2 f - f2 (f = schiacciamento)
- b = a E, semiasse minore
- c = a e, fuoco
- k = a2/b
Altri parametri, che dipendono dal punto in esame (tramite la latitudine) sono
- W2 = 1 - e2 sin2(t)
- N = a/W, raggio di curvatura nel piano verticale primario
- il secondo raggio di curvatura: r = a E2/W3
- il raggio della sfera locale: R=(r N)1/2,
- il raggio del parallelo e` rp = N cos{n}.
La trasformazione inversa e` piu` complessa
(formule di Bowring),
tg(g) = v/u
tg(t) = (w + e'^2 b sin^3(m))/(p - e^2 a cos^3(m))
h = p/cos(t) - N
dove
- p2 = u2 + v2, e` la coordinata radiale del punto
nel piano orizzontale
- r2 = u2 + v2 + w2, coordinata radiale del punto
- tg(m) = (w a) / (p b)
Per esempio
la conversione tra WGS84/ETRS89 e Roma40 si puo` scrivere [
447]
XRoma40 = T + s R * XWGS84
dove
T rappresenta la traslazione (88, 39, -48)
s e` il modulo di scala 1.000029, e R e` la matrice di rotazione
| 1 0 0 | | c2 0 -s2 | | c3 s3 0 |
R = | 0 c1 s1 | * | 0 1 0 | * | -s3 c3 0 |
| 0 -s1 c1 | | s2 0 c2 | | 0 0 1 |
\
in cui i coefficienti sono i coseni e i seni degli angoli di
rotazione, r1=0.3", r2=-2.0", e r3=-0.1".
I valori dei parametri sono stati troncati, poiche`
il risultato e` comunque approssimato. Infatti
i parametri della trasformazione dipendono dal punto di applicazione
dato che la realizzazione dei datum dipende dalle coordinate assegnate
ai punti di riferimento della rete geodetica.
Per elevate precisioni occorre comunque usare
interpolazioni polinomiali.
Per passare tra due sistemi di riferimento si puo` quindi convertire latitudine,
longitudine e altezza in coordinate cartesiane, e passare da
(u,v,w)
1 a (u,v,w)
2 con la composizione della trasformazione
da (u,v,w)
1 a (x,y,z) e dell'inversa di quella per il sistema 2.
Essendo queste rototraslazioni anche la composizione e` tale:
| u | | Du | | 1 dw -dv | | u |
| v | = | Dv | + (1+ds) | -dw 1 du | | v |
| w | | Dw | | dv -du 1 | | w |
2 2 1
dove (Du,Dv,Dw) sono le coordinate dell'origine del sistema 1 espresse nel
sistema 2, gli angoli della rotazione sono le differenze degli angoli
delle due rotazioni (es. dw = dw
1-dw
2) e il modulo di scala
e` ds = ds
1 - ds
2.
I parametri delle trasformazioni di Helmert accurate tra Roma40 e WGS84
non sono liberamente disponibili, ma sono in vendita dall'IGM.
Quelli delle trasformazioni (approsimate)
fra i sistemi nazionali ed ETRS89 si trovano in rete
http://crs.bkg.bund.de/crs-eu
.
Solitamente gli angoli di rotazione sono dati
in secondi, e bisogna esprimerli in radianti nelle formule. La correzione
di scala e` data in parti per milione (ppm) percio` bisogna moltiplicarla
per 10
-6.
Per esempio per passare da Roma40(X,Y,Z) a ETRS89(X,Y,Z)
i coefficienti della trasformazione di Helmert sono [
371]
(per le isole sono differenti)
Du = -104.1 m
Dv = -49.1 m
Dw = -9.9 m
Rotazione asse u = +0.971"
Rotazione asse v = -2.917"
Rotazione asse w = +0.714"
Correzione di scala = s = -11.68 E-6
Spesso si hanno le coordinate cartografiche, nord
n,
est
e e altezza ortometrica
H. La relazione fra queste e le
coordinate cartesiane e` una rototraslazione,
|e| | -sin(g) cos(g) 0 | |u| | 0 |
|n| = | -sin(t)cos(g) -sin(t)sin(g) cos(t) | |v| + | e2 N cos(t) sin(t) |
|H| | cos(t)cos(g) cos(t)sin(g) sin(t) | |w| | -G - N (1-e2 sin^2(t) |
dove (t,g) sono latitudine e longitudine del punto "origine", e
(u,v,w) sono le coordinate cartesiane (ellissoidiche).
N e` la gran normale, e
G e` l'altezza del geoide sopra
l'elllissoide. Se interessano solo le coordinate relative rispetto ad
un punto di riferimento il termine di traslazione si cancella.
La trasformazione che lega due sistemi di coordinate puo` essere espressa
direttamente in coordinate cartografiche
(traformazione di Molodensky)
[
448] .
Il vantaggio della trasformazione di Molodensky e` che separa
le coordinate planimetriche dalla quota.
Le formule sotto riportate sono in forma ridotta,
senza i contributi delle rotazioni e del fattore di scala.
t' = t + dt
g' = g + dg
h' = h + dh
den = (M+h) * sin(1")
dt = { du sin(t) cos(g) + dv sin(t) sin(g) - dw cos(t) } / den
+ { [ da e2 / W + df ( M / E + N E ) ] sin(t) cos(t) } / den
dg = { du sin(g) - dv cos(g) } / ( den * cos(t) )
dh = - ( du cos(g) + dv sin(g) ) cos(t) - dw sin(t)
- da (a/V) + df (b/a) V sin(t)^2
dove
M=a E
2 W
-3 (
a e` il semiasse dell'ellissoide).
Le correzioni alle coordinate geografiche sono espresse in secondi,
le altezze in metri.
t (latitudine),
g (longitudine) e
h (altezza) sono le
coordinate nel sistema di partenza (in particolare
h=
G+
H,
deve tener conto dell'altezza del geoide).
V=a/(1-e
2sin
2(t))
1/2 e` il raggio di curvatura
perpendicolare al meridiano,
p=a(1-e
2)/(1-e
2sin
2(t))
3/2 quello nel meridiano.
a,
b,
f,
e sono i parametri dell'ellissoide nel sistema di
partenza (e
2 = 2 f - f
2).
du,
dv,
dw e` lo spostamento dell'origine e
da,
df le differenze
di ellissoide (sistema di arrivo meno sistema di partenza).
Infine sin(1")=0.48481 10
-5
Questa trasformazione si puo` scrivere
t' = t + dt
g' = g + dg
h' = h + dh
dove (dt,dg,dh) e` la soluzione del sistema
| (N+h)cos(t) dg | / |Du| | ds dw -dv | |u| \
| (N+h) dt | = R | |Dv| + | -dw ds du | |v| - D |da| |
| dh | \ |Dw| | dv -du ds | |w| |df| /
dove
R e` la matrice di rotazione che lega (x,y,z) a (e,n,h),
(Du,Dv,Dw) e ds, (du,dv,dw) sono i coefficienti della rototraslazione
nella formula di Helmert, in particolare ds=ds
2-ds
1,
da=a
2-a
1(1-ds) e df=f
2-f
1 sono le differenze
nei parametri degli ellissoidi, e
D e` la matrice
| cos(t)cos(g)/W a(1-f)/W^3 sin^2(t)cos(t)cos(g) |
| cos(t)sin(g)/W a(1-f)/W^3 sin^2(t)cos(t)sin(g) |
| E^2 sin(t)/W (M sin^2(t) - 2 N)(1-f)sin(t) |
e
M=a E
2/W
3.
La relazione fra coordinate (n,e,h) e (t,g,h) e` espressa come
una approssimazione in serie. Per esempio le formule di Hirvonen
[
449]
e = k arcSh( cos(X) tg(g) / V )
n = A1 X - A2 sin(2X) + A4 sin(4X) - A6 sin(6X)
dove
- V'2 = 1 + e'2 cos2(t)
- X = atan( tg(t) / cos(g V') )
- V2 = 1 + e'2 cos2(X)
e i coefficienti A1,... dipendono dall'ellissoide considerato.
La trasformazione inversa usa altri coefficienti (B1,...),
g = atan( V Sh(e/k) / cos(X) )
t = atan( tan(X) cos(g V) )
dove
X=n' + B2 sin(2n') + B4 sin(4n') + B6 sin(6n') essendo n'=n/A1
Nell'applicare queste formule occorre tenere in conto
- le false origini, cioe` il fatto che i valori numerici delle coordinate
possono contenere costanti addizionali convenzionali. Per esempio le
coordinate est in Gauss-Boaga hanno aggiunto 1500000 o 2520000, a seconda
del fuso; similmente le longitudini hanno aggiunto il valore del meridiano
centrale del fuso e sottratto quello di Monte Mario;
- usare gli angoli espressi in radianti;
- considerare il modulo di scala (0.9996); i coefficienti possono
essere dati gia` compensati.
Queste trasformazioni coinvolgono i sistemi di riferimento terrestri
(TRS). Le analoghe trasformazioni in termini dei riferimenti terrestri
(TRF) sono molto piu` complicate, con milioni di coefficienti, per
tenere in conto le distorsioni locali dei riferimenti terrestri
[
448] .
Infine la conversione di coordinate cartografiche tra diversi sistemi di
riferimento
(eg. Gauss-Boaga e UTM) puo` essere fatta approssimativamente, con
semplici costanti additive (che pero` variano localmente, in genere
valide per ciascun foglio 1:100000). Per esempio
eUTM = eGB - 999946 [m]
nUTM = nGB + 182 [m]
Il valore della costante per la coordinata est tien conto della differenza
di falsa origine. Formule analoghe, con validita` locale, sono
utilizzabili per le coordinate geografiche. I valori delle costanti
additive sono desumibili per interpolazione dalle carte delle curve
isotransitive. Per esempio
tUTM = tGB + 5".93
gUTM = gGB + 12°27' 08".4 + 2".25
dove per la latitudine si e` incluso anche il valore di Monte Mario.
Le curve isotransitive per il passaggio da coordinate geodetiche
Gauss-Boaga a UTM sono mostrate nella figura sotto.
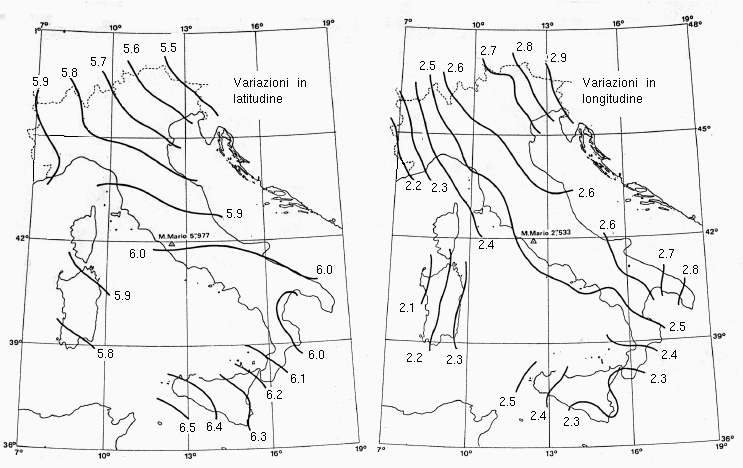
Fig. 204. Curve isotransitive
Il modulo di deformazione lineare e` il rapporto delle distanze
sul piano di proiezione rispetto a quelle sull'ellissoide. Vale
1 solo per particolari linee. Nelle proiezioni conformi esso
dipende dal punto di valutazione, ma e` uguale per ogni direzione.
E` dato da (m
0 e` il modulo di scala)
m = m0 ( 1 + [e/m0]2 / (2 r N) )
= m0 ( 1 + (g cos(t))2 / 2 )
dove
e e` la coordinata est, e
t e
g sono latitudine e
longitudine.
r e
N sono parametri (locali) dell'ellissoide.
Il modulo di deformazione angolare e` dato dalla differenza
degli angoli tra il piano e l'ellissoide. Nelle proiezioni conformi
esso e` nullo. Il modulo di deformazione di area e` il rapporto delle
aree fra il piano e l'ellissoide. Esso vale 1 nelle proiezioni
equivalenti. Una proiezione cartografica non puo` essere conforme
ed equivalente al contempo.
La distanza fra due punti dipende dalla quota,
d(Q) = (dn2 + de2)1/2 / [ m0 ( 1 - Q/R ) ]
dove
de e
dn sono le differenze di coordinate est e nord, e` la quota e
R e` il raggio della sfera locale.
L'azimuth di una data direzione (de,dn) deve tener conto della convergenza
v, e della curvatura delle geodetiche:
azimuth = atan(de/dn) + v + dn (2 e1 + e2 )/(6 r N m02 )
dove la convergenza e`
v = g sin(t) [ 1 + ( g2 cos2(t) / 3 )
( 1 + 3 cos2(t) (a2 - c2)/c2 ) ]
4.E.1 Links
Cartografia
Una descrizione delle proiezioni cartografiche, con molti disegni e links.
Projezioni
Formule per le varie
proiezioni cartografiche, si possono trovare nelle sottosezioni linkate da
questa pagina.
Verto
Il programma di rifermento per la conversione di coordinate per l'Italia,
E` prodotto (e venduto) dall'Istituto
Geografico Militare, che vende anche i dati per le conversioni fra
datum relativi ai punti di riferimento della rete geodetica nazionale.
Traspunto
Un software DOS del Ministero dell'Ambiente per la conversione di
coordinate.
CartLab
Un convertitore di coordinate fra i sistemi UTM/Europa50,
Gauss-Boaga/Roma40 e UTM/WGS84, con una precisione di 3 m.
GeoMag
Anche se
fondamentalmente calcola la declinazione magnetica in un punto, questo
programma determina anche le coordinate UTM.
proj-4
Una libreria di conversione di coordinate.
marco corvi - Mon Nov 19 11:34:13 2007
Prev Up Top Next Contents
This work is licensed under a Creative Commons
Attribution-NonCommercial-ShareAlike 2.0 Italy License.