Teoria | Aplica��es | Exemplos | Componentes da equipe | Sites | Download | Softwares
Exemplos
Gerador de Regras Fuzzy para o Controle de Acelera��o de um Sistema de Controle Adaptativo de Viagem
Resumo:
Um procedimento para a gera��o de dados conduzidos por regras fuzzy � descrito, que foi usado no desenvolvimento de um controlador adaptativo fuzzy para assistir o condutor na velocidade do ve�culo e controle de dist�ncia. O condutor permanece no controle do loop do ACC(Adaptative Cruise Control) atrav�s da realimenta��o via pedal do acelerador. Deste modo, o controle do comportamento do pedal � crucial para aceita��o do sistema pelo condutor. O Fuzzy-ACC foi instalado dentro de um carro de teste e testado em estradas normais de tr�fico.
1. Introdu��o
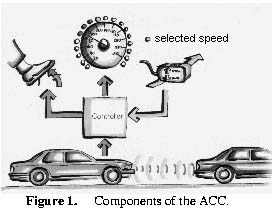
O procedimento de gera��o de regras fuzzy descrito neste artigo � parte do desenvolvimento do sistema de assist�ncia ao condutor ACC que � uma extens�o do bem conhecido Controle de Viagem. Em adi��o a funcionalidade b�sica de um Controle de Viagem o ACC mede a dist�ncia para o pr�ximo ve�culo e ajusta a velocidade para manter uma dist�ncia apropriada. A figura 1 mostra os diferentes componentes do sistema[1]. O ACC determina um ponto fixo para o regulador de press�o e freio, respectivamente, e fornece informa��o �tica para o condutor atrav�s do painel com a velocidade selecionada e a velocidade precedente no veloc�metro. A fim de manter o condutor como parte ativa no loop de controle, o Fuzzy ACC � combinado com um pedal de acelerador ativo. O sistema controla um contador de for�a artificial no pedal de acelerador ativo monitorando a posi��o deste que atualmente � necess�ria para manter a velocidade e dist�ncia apropriada. O condutor, que pode sentir estas for�as como realimenta��o do sistema, � encorajado a usar esta informa��o para ajustar a correta posi��o do pedal. Enquanto o condutor � guiado pelo controlador, ele sempre est� habilitado a anular as a��es do ACC sem desativar o sistema completamente. Este trabalho � uma extens�o de uma antiga aproxima��o para o uso de controle fuzzy para dire��o inteligente de ve�culos[2].
2. Estrutura do Fuzzy-ACC
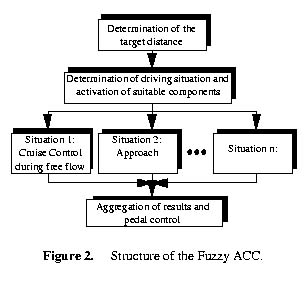
A figura 2 mostra um diagrama de blocos do Fuzzy ACC. Primeiro a dist�ncia designada � determinada dependendo da velocidade do carro. Ent�o um componente fuzzy determina a atual situa��o de condu��o com considera��o a v�rios valores de entradas como dist�ncia e velocidade relativa. � nomeado ent�o de certo modo um valor de ativa��o que varia de 0 a 1 a cada situa��o de componentes espec�ficos, na pr�xima camada isso permite alguns desses componentes a ser simultaneamente ativo. H� situa��es que s�o projetados componentes fuzzy espec�ficos para dirigir certas situa��es de condu��o tais como Controle de Viagem durante fluxo livre ou Rea��o para encurtamento de dist�ncia. Finalmente os resultados da situa��o dos componentes espec�ficos na forma de v�rios valores para a acelera��o desejada � ent�o passado para o pedal de controle para que seja convertido dentro de um ponto fixo para o g�s ou pedal de freios. A maioria dos componentes de controlador descritas incluem um tipo de par�metro de condu��o que permite mudar o comportamento de componentes dentro de certos limites e, s�o usados para adaptar o comportamento de sistema global para as prefer�ncias do condutor. A adapta��o deste par�metros � ativado pela intera��o do condutor e o pedal de acelerador ativo. Para informa��o adicional sobre a estrutura do Fuzzy ACC e o mecanismo de adapta��o veja [3].
3. Id�ia B�sica do Pedal de Controle
O pedal ativo do acelerador � a principal interface entre o condutor e o Fuzzy ACC. Ele fornece uma posi��o do pedal que � necess�rio para manter a dist�ncia e velocidade apropriada. Adicionalmente a intera��o do motorista e o pedal (por exemplo o motorista aceita o ponto fixado ou ele pisa no acelerador mais que o sugerido?) � usado como par�metro de adapta��o para trazer o comportamento do sistema para dentro da linha de prefer�ncias do condutor. Ent�o o algoritmo de controle para o pedal ativo de acelerador encontra os seguintes requisitos:
A acelera��o requerida pelo controlador tem que ser alcan�ada dentro de um razo�vel tempo curto e com uma precis�o alta suficiente para cumprir os objetivos intencionados.
O comportamento do pedal de acelerador tem que ser claro e conveniente para o motorista, por exemplo ele nem poderia oscilar nem se arrastar at� o ponto fixado.
O controlador n�o deve reagir se ele n�o pode alcan�ar a posi��o objetivada do pedal porque o condutor anularia a a��o.
Enquanto o terceiro requisito pode ser facilmente encontrado por um apropriado mecanismo controlador de for�a, os outros dois requisitos s�o contradit�rios em muitas situa��es, deste modo alta precis�o tem que ser sacrificada para alcan�ar um comportamento confort�vel do pedal. A id�ia b�sica do controlador fuzzy descrito � imitar o modo de condu��o humano manipulando o acelerador para ajustar a velocidade do ve�culo:
Se o condutor deseja acelerar por uma certa extens�o, ele ajusta o pedal para uma posi��o correspondente dependendo da velocidade atual do ve�culo.
Para terminar o processo de acelera��o, o condutor escolhe uma posi��o do pedal que � adequada para compensar a fric��o e a resist�ncia do ar para a atual velocidade.
Pequenas diverg�ncias para a acelera��o desejada s�o compensadas por ajustes finos no pedal em volta da posi��o correta.
Quanto mais o condutor conhece seu carro, mais capaz ele � de determinar a correta posi��o do pedal. Ele tem seu pr�prio modelo interno da din�mica do carro e a inter-rela��o entre a acelera��o desejada, a atual velocidade do ve�culo e a correspondente posi��o dos freios.
O �ltimo ponto ilustrado pela experi�ncia mostra como � dif�cil inicialmente dirigir um carro desconhecido e como rapidamente um motorista experiente adapta o modelo interno dele para a din�mica do carro novo.
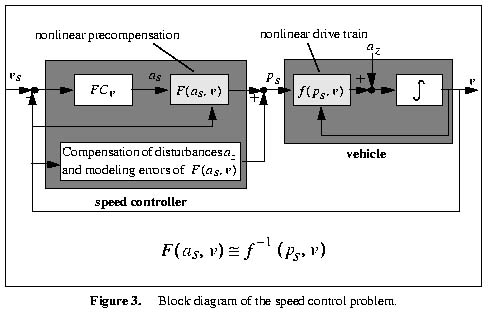
A figura 3 mostra a interpreta��o desta aproxima��o (para simplicidade reduzida ao problema de controle de velocidade) do ponto de vista do controle do engenheiro: Dependendo da diferen�a entre a velocidade designada vs e a velocidade atual v o controlador fuzzy FCv determina a acelera��o necess�ria. Para determinar a posi��o outorgada do pedal ps, temos que administrar as n�o linearidades do treinamento do condutor f(ps, v). Deste modo estamos olhando para uma pr� - compensa��o n�o linear F(as, v) que aproxima o inverso das caracter�sticas do condutor. Adicionalmente necessitamos de uma compensa��o para as perturba��es az(por exemplo causadas durante condu��es para cima/para baixo) e os inevit�veis erros de pr� - compensa��o n�o linear.
A aproxima��o para esta pr� - compensa��o n�o linear ou "modelo", uma fun��o com duas entradas (acelera��o necess�ria, velocidade atual) e uma sa�da (posi��o do pedal) por meio do Controle Fuzzy nos lan�a de matem�tica que modela as caracter�sticas est�ticas complexas da din�mica de carro com n�o linearidades causadas por exemplo pela transmiss�o autom�tica.
4. Treinando Dados Pr�-processados e Gerando Regras
Para que gere-se as regras fundamentais do controlador do pedal automaticamente, dados representativos a din�mica do carro s�o necess�rios. Estes dados foram reunidos durante v�rios teste com o carro, um BMW 530 touring e ent�o preprocessados atrav�s da extra��o dos pontos onde a posi��o do pedal bem como a acelera��o permanecesse aproximadamente constante por um certo per�odo de tempo, por exemplo 1 segundo. Estes valores juntos com as velocidades correspondentes foram coletados para construir o conjunto de dados de treinamento. A Figura 5 mostra os dados ganhos depois de preprocessados (esquerda) usando a op��o dgrid3d da ferramenta gnuplot. Embora a superf�cie pare�a bastante "�spera", porque os dados ganhos s�o ruidosos (causados pelas insufici�ncias do sensor) bem como incompletos, isto �, n�o todos os pontos do espa�o de entrada foram cobertos, isto justifica a suposi��o de uma rela��o funcional limpa entre os valores guardados. O algoritmo para a gera��o das regras fuzzy � uma combina��o do esquema table-lookup e a vizinhan�a mais pr�xima que agrupam-se para o treinamento de sistemas de l�gica de fuzzy descritos em [4].
A estrutura do Controlador Fuzzy, isto �, o n�mero de entradas e sa�das dos conjuntos Fuzzy para as vari�veis de entrada, tem de ser predefinidas. A defini��o das vari�veis de entrada pode ser feita com a ferramenta de desenvolvimento de l�gica fuzzy TILShell 3.0. O arquivo FPL resultante (Fuzzy � Programming - Language [5]) � ent�o interpretado pelo algoritmo descrito. Aqui um n�mero de 15 conjuntos foi escolhido para a vari�vel de entrada a (acelera��o) e v (velocidade). Como resultado n�s temos uma base de regra com 15*15 = 225 poss�veis regras com os resultados inicializados com 0.
O algoritmo de treinamento olha para a regra com a ativa��o mais alta para cada vetor de entrada (a, v) e soma os valores correspondentes da posi��o do pedal para a conseq��ncia desta regra.
Depois de todos os pontos terem sidos emparelhados, o resultado m�dio para cada regra � computado. Estes resultados servem como Conjuntos Fuzzy (singletons) para a vari�vel de sa�da pedal. Desde que isto pode levar a um n�mero muito grande de Conjuntos Fuzzy (225 neste caso) os conjuntos s�o reduzidos a um n�mero aceit�vel (aqui 22) pelo procedimento de agrupamento de vizinhan�a mais pr�xima.
Finalmente o controlador fuzzy resultante � armazenado com um arquivo FPL para simplificar a visualiza��o e modifica��es manuais e permitir o uso do compilador FPL-to-C do TILShell 3.0.
O controlador resultante � mostrado na Figura 4. Como o treinamento dos dados foi incompleto, todas as regras poss�veis n�o foram geradas, mas as regras fundamentais puderam facilmente ser completadas pela tend�ncias seguintes das regras geradas(regras somadas manualmente s�o marcadas por um background obscuro). Figura 5 mostra o treinamento dos dados, a fun��o aproximada pelas regras geradas e a fun��o das regras fundamentais complementadas manualmente. O controlador fuzzy final � uma boa representa��o da intera��o funcional assumida dos dados treinados. Certamente esta parte do controlador s� n�o � suficiente para fechar o loop de controle, porque n�o existe considera��es para diverg�ncias entre a acelera��o de objetivo e a atual acelera��o. Ent�o o controlador do pedal iria por exemplo render uma acelera��o muito baixa durante uma subida e uma acelera��o muito alta durante uma descida. Este problema pode ser simplesmente resolvido pela adi��o de um simples compensador integral que � ativado, quando a atual posi��o do pedal est� perto da posi��o do pedal proposta pelo controlador fuzzy.
5. Resultado dos Testes
O Controlador Fuzzy descrito foi implementado em uma carro de teste e executado bastante bem em v�rias situa��es de dire��o. O comportamento do pedal de acelerador ativo sentia muito bem o "gosto humano" e cumpriu os requisitos descritos na se��o 3. O papel de um test drive com o Fuzzy ACC apresentado na Figura 6 mostra que a precis�o do controle de acelera��o foi alto bastante para conhecer as inten��es da situa��o motriz anterior componentes de controlador espec�ficos.
6. Conclusão
O procedimento descrito para aprendizado de regras Fuzzy a partir de dados treinados � um m�todo forward direto para capturar inter-rela��es funcionais entre par�metros pertinentes. Isto habilita o usu�rio a construir o tamanho de regras de base geradas e a resolu��o dos resultados aproximados pelo n�mero de entradas dos Conjuntos Fuzzy. Esta resolu��o pode ser ajustada especificamente para o problema atual atrav�s da forma e posi��o dos conjuntos Fuzzy. Adicionalmente este procedimento permite complet�-lo, estendendo e/ou modificando localmente o gerador de fun��es atrav�s da soma ou mudan�a de certas regras.
Referencias
K. Naab, G. Reichart: Driver Assistance Systems for Lateral na Longitudinal Vehicle Guidance. Proceeding of the International Symposium on Advanced Vehicle Control, Tsukuba. Japan, Oct. 25. � 28. 1994, pp. 449 � 454.
P. Protzel, R. Holve, J. Bernasch na K. Naab: Fuzzy Distance Control for Intelligent Vehicle Guidance. Proc. Of the 12 Annual Metting od the North American Fuzzy Information Processing Society, Allentown PA, Aug. 22-25, 1993, 87-91
R. Holve, P. Protzel, J. Bernasch and K. Naab: Adaptative Fuzzy Control for Driver Assistance in Car-Following. Proceeding of the 3 European Congress on Intelligent Techiniques na Soft Computing � EUFIT 95. Aachen, Germany, Aug. 1995, pp. 1149 � 1153.
L. �X Wang, Adaptative Fuzzy Systems and Control � Design and Stability Analisys. PTR Prentice Hall, 1994. TIL Shell User Manual, Togai InfraLogic, Inc. Irvine, CA 1993.