Sept 7, 2002
|
|
|
Ok, folks, it's time for a complete rebuild. Although I was quite happy
with the performance at HoN, it needs to be changed to comply with the
new walker/shuffler rules. Because the drive motors continuously rotate,
this is classified as a "shufflebot" which therefore only gets
1.5x weight advantage instead of the 2x it was designed for. In traditional
Team Nar fashion I have decided to take the more complicated route and
make it a "true walker" instead of trying to lose 6+ oz. The
walking mechanism will be similar to Alan Young's Ixion, the original
version which used servos for locomotion. This uses a pair of lifer legs
and a pair of slider legs. The lifters raise the bot, the sliders move,
the bot is lowered and the sliders re-center. Turning is accomplished
tank style by moving one slider forward and one backward and re-centering.
I have a couple of interesting twists I plan on trying to make this design
a bit more effective and faster. More info will be posted soon so stay
tuned to this page for more.
|
 |
This is the weapon motor the new version will
use. This thing is mean, a Wattage Super 400 cobalt motor. Cobalt magnets
and a 27 turn armature hit speeds of 19,500RPM at 7v. It weighs 3.7 oz with
the prop adapter shown (most likely to be replaced with my own drive). I'll
probably run it at 6v and it should draw around 20 amps like this. Stall
current is a whopping 65 amps! Hope I never hit that. |
Sept 14, 2002
|
|
|
Ordered the servo sprockets and chain from Servo
City. I have also found the microprocessor I am going to use to control
this thing, a "Stamp Stack" from HVW
Tech . It is basically a Basic Stamp II only it comes with a programming
port built in and it's own carrier board. It comes as a kit, and is about
$33 American (looks like I'm buying stuff from Canada too :) Also put in
the order for some carbon fiber baseplate material from SozBots
. Even though I think their walking rules are a little weird, they have
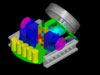
some good parts. Here is the cad rendering of the bot right now. There are
a couple of things missing (like the outer armor) but you still get the
picture. |
Sept. 20, 2002
|
 |
Parts have begun rolling in for v2.00 including
this piece of carbon fiber from SozBots.
This is what most of the chassis will be made from. It's very stiff and
light, especially for being just a hair under 1/16" thick. Plus it
looks really cool. |
 |
This little beauty is the brains behind the whole
opperation, a Stamp Stack II from HVW
Tech. I got it sent next day air and it still wound up costing less
than a BS2 IC from Parallax (although the two are exactly the same in functionality)
Yay Canadian exchange rates! It has it's own carrier board which saves me
the trouble of trying to cobble one together myself, and as an added bonus
it comes as a kit which you get to put together yourself (I really dig stuff
like that). Only took about an hour to assemble not counting the 20 minutes
I spent looking for a transistor I dropped on my multicolored (lot's of
little black specks) floor. |
 |
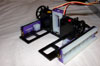
Here's the setup I used to get the walking routine
up and running. I'll post the code when it is finalized, right now I need
the mechanics to be complete in order to fine tune the parameters. If you
look really close you can see the sprockets on two of the servos from Servo
City. The whole thing is kind of kludged together on the breadboard
right now, I still have to make a little interface board to plug the servos
and Rx inputs into, as well as get hold of a lighter Rx. The good news is
that the walking program is basically done, it's so satisfying the first
time you get something like this running. If you haven't played with a micro
like this before, go try it, it's a whole lot of fun. |
Sept 26,2002
|
 |
Here is most of the chassis cut from the above
carbon fiber. This stuff is kinda nasty, after 3 inches of cut with a scroll
saw the blade is unusable. Most of this was sanded to size after rough cutting
with the saw. To the left is the baseplate, on the right is the weapon mounting
bracket. This will sit at a 60 degree angle to the front of the base. It
holds the spinning disk. |
 |
This is the beginnings of the leg. I machined a groove down the center
of the top of the leg to hold the servo chain. This makes a kind of "rack"
gear only instead of a gear it's a sprocket. The sprocket drives the leg
back and forth as the servo turns. There's a bunch more machining to do,
but I'm feeling a little under the weather today. Hopefully more tommarrow...
|
Oct 4, 2002 : Be afraid, be very afraid...
|
 |
I finnished the sliding legs, here's a shot. I
had to redo the above one as I had not taken into account the thickness
of the sprocket in the CAD. Not a huge deal, just moved the chain slot over
about .125" . The little brass clips also are new to this version,
they hold and tension the chain in the groove. I cut the mounting horn off
the servos so they would sit flush with the base and mounted them up. That
nylon piece in the center is part of the lifter mechanism (as well as part
of the weapon support) I'll explain it in a bit. |
 |
A shot from the bottom reveals the lifter foot.
With any luck this will mean that the cutting of the carbon fiber is over.
It's almost as bad as fiberglass insulation with skin irritation. I love
the mechanical propperties, but it is nasty to work with. The foot is a
little tough to make out, it's the circular, almost cross shaped piece in
the center. This lifts, the sliders move, the center is set back down, and
the sliders center. |
 |
This is a close-up shot of the lifter mechanism
which is tucked inside that nylon bit I described above. The aluminum shaft
goes through the bracket and attaches to the lifter foot above. The bracket
supports it top and bottom and it is free to rotate along with the lifter
foot. The two collars were made from nylon spacers I found at the depot,
and between them is a nylon "fork" I made which attaches to the
servo horn. The reason it needs to be a fork is so that it can move on the
shaft as it is moved back and forth by the servo horn's arc (someday I may
draw a diagram as that is tough to swallow, but trust me it needs to be
done). It also is integral to allowing the shaft to rotate. A couple of
minor tweaks to the software and I was up and rolling, or rather walking
around the kitchen table. I also tested the cobalt motor, and you are all
in big, big trouble. That thing has well more than enough torque that I
may just wind up running it direct drive. We are talking some riddiculous
RPM's and insane power. |