|
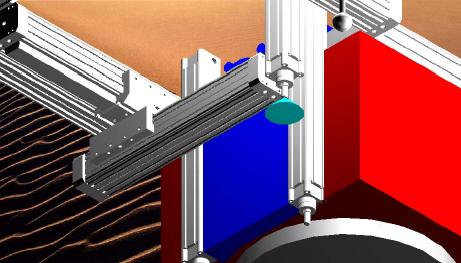
Para recoger una bola de billar
en la prueba de Object retrieval necesitamos de un dispositivo que pueda
tomarla, habían varias posibilidades. Como ponerle una pinza para
que pudiera tomarla. Descartamos esta posibilidad debido a que Festo no
maneja pinzas grandes como para tomar una bola de billar, otro método
era el de hacer una caja que se cerrara cuando esté cerca de la
bola y la tomara, pero tendríamos que mandar a hacer el dispositivo.
Decidimos ponerle una válvula de vacío que Festo produce
para que tomara la bola de billar. Las ventajas de esta opción son
las siguientes:
Se reduce el costo, ya que podemos conseguirla
como un producto cualquiera
Tenemos una alta calidad, debido a que el proveedor
tiene amplia experiencia fabricando ese tipo de elementos
El producto es estandarizado y compatible con
los demás dispositivos
La válvula es del mismo proveedor que los
demás pistones
Alta versatilidad debido a su sistema de posicionamiento
en tres las dimensiones
 En la caja tenemos cuatro pistones que son los que van a
controlar la inclinación del robot, para que no pierda el equilibrio
cuando se encuentre pasando la prueba del plano inclinado.
En la caja tenemos cuatro pistones que son los que van a
controlar la inclinación del robot, para que no pierda el equilibrio
cuando se encuentre pasando la prueba del plano inclinado.
La forma en la cual se desplaza el robot es la misma como
la que se desplaza el robot ganador del concurso pasado, Némesis.
Primero se mueve la caja de posición hasta llegar a su desplazamiento
máximo. Enseguida las extremidades reducen su amplitud en el eje
Z y el robot empieza a disminuir su altura hasta que la caja toca el piso.
Luego la caja desplaza a los pistones
|