DISEÑO
DEL ROBOT |
Después de ver alguno diseños
que han triunfado en el concurso Walking Machine, decidimos hacer el robot
en su forma general como el Némesis de la universidad de Bonaterra.
Decidimos tomar la capacidad de movilidad que tiene Atomas por sus extremidades
movibles. También tener una caja donde estén los componentes
pesados para no tener problemas con el centro de masa, igual que lo tiene
Octane. Y como Hydromas decidimos darle la capacidad de girar sobre su
propio eje tomando el mismo mecanismo que Calvinator II.
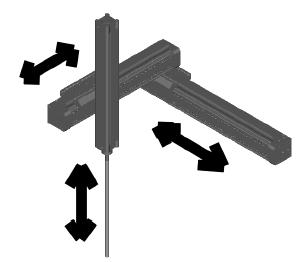
A las extremidades les dimos gran importancia ya que
ellas son las que le van a dar la capacidad de superar los obstáculos,
decidimos que el robot debería de tener sus extremidades independientes
para que pueda subir obstáculos (pendiente inclinada) o bien pasar
por encima de ellos (llantas). A las extremidades le dimos la capacidad
de moverse en los ejes X, Y, y Z puesto que les pusimos
tres actuadores, uno para cada tipo de movimiento. El diseño de
las extremidades fue la siguiente:
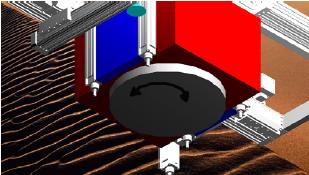
 El siguiente punto es la caja que va a ser el cuerpo del
robot, donde va a estar el demás equipo que contenga masa considerable
como las baterías, válvulas, el engrane, etc. El mecanismo
para hacer girar el robot consiste en un pistón DGPL505000 que tendrá
acoplado un engrane lineal que moverá a otro engrane circular proporcionandonos
así el movimiento giratorio deseado, con 360° de desplazamiento.
El siguiente punto es la caja que va a ser el cuerpo del
robot, donde va a estar el demás equipo que contenga masa considerable
como las baterías, válvulas, el engrane, etc. El mecanismo
para hacer girar el robot consiste en un pistón DGPL505000 que tendrá
acoplado un engrane lineal que moverá a otro engrane circular proporcionandonos
así el movimiento giratorio deseado, con 360° de desplazamiento.
|