
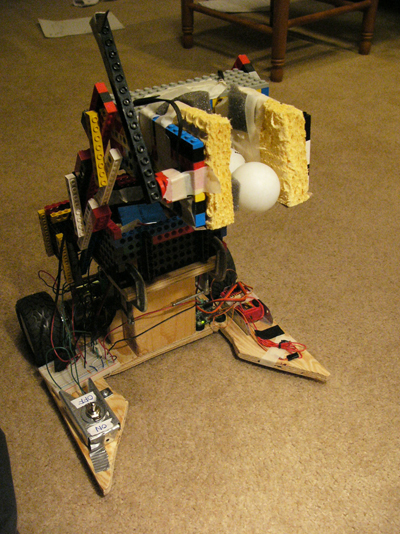
The objective of the event was to pick up various items off of the playing field, deposit them into a goal box, and finally pop a balloon that lay inside of the goal box. The event took place on a playing field that had the approximate dimensions of eight by four feet. The robot was placed in the very center of the playing field; the goal box lay behind it at the very edge of the field, and the various items that needed to be picked up lay in front of the robot on the sides of an imaginary equilateral triangle. The items consisted of two stacks three corks, four ping pong balls, and a small tower consisting of a gold ball resting on top of an open, empty 35 millimeter canister.
Details and pictures of the playing field
The main limitations on the actual robot itself were that, at the beginning of the event, it had to fit within a 30 x 30 x 30 centimeter cube, and that the total voltage on any part of it could not exceed 9.6 volts.
Robot Details:
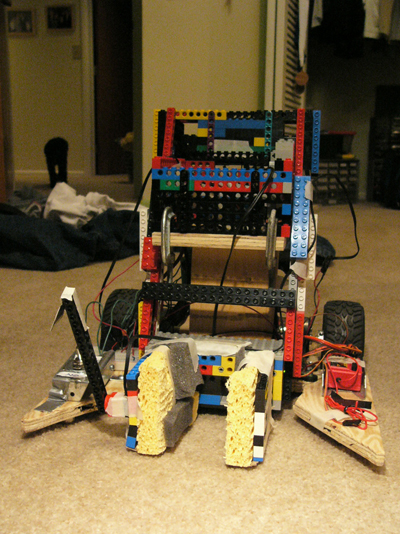
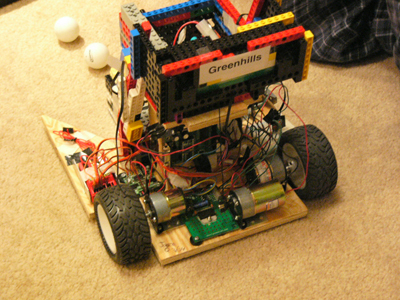
The robot was controlled at the highest level by a Basic Stamp 2 (BS2) chip, sitting in a carrier board called the Board of Education. The BS2 read signals from a Hitec brand R/C receiver and sent corresponding signals to a motor controller to open/close the gripper or raise/lower the arm. The robot was driven by two Hsiang Neng motors, each of which powered a rear wheel, and the front of the robot was stabilized by small, metal castors. Control of the motors was directed by a SOZBOTS-M speed controller, which was connected directly to the Hitec R/C Receiver (no BS2 involved).
The day of the event:
I went to Regionals on March 19th, 2005, and scored 1st place in Robot Ramble. I received 97 points; meeting all of the event requirements with the exception of placing two ping-pong balls into the box. What happened was that there was just under a minute left in the competition, and all of the items except two ping-pong balls were in the goal box. I drove the robot over to the two balls (that were positioned next to each other), and when I attempted to close the claw, the claw popped off of its sliding track and fell on the floor. All hopes of a perfect score were gone!