The Motion Planning Game can be used to
test skill.
The games are Moving
Objects, Robot Arm, Driving a Car and
Multiple Robots.
If you choose the Robot Arm
games there are six challenges to complete.
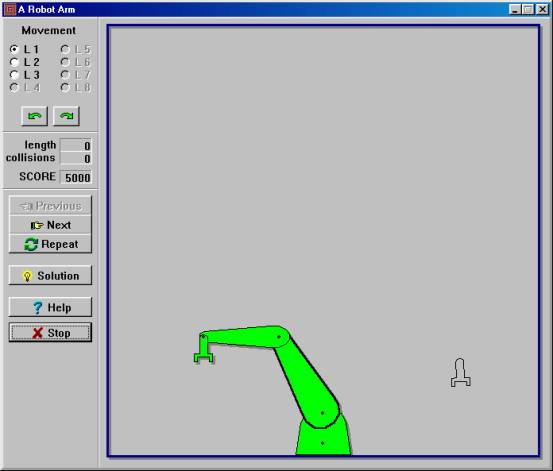
The three Movements L1, L2
and L3 correspond to the shoulder, elbow and wrist of the arm.
The idea of the game is to
achieve your goal in the least number of movements.
It is very easy for a person
to “forget” how they did it when the goal is achieved so…
Record your Mouse Clicks in
this PROGRAM FORMAT
01 L1 RIGHT ONE
02 L2 LEFT TWO
03
04
Once you have completed your
program and recorded it you may wish to revise what you have done.
This task is now repeatable
as you only have to follow the program.
The problems that would
occur in a “real life” situation would be the exact positioning of the arm and
the goal to be achieved.
This is a reason “feedback’
is important so that a check on progress can be made.
We could change our code
into a “machine code” by following these rules.
Let us assume that
1.
There would be a
maximum number of commands. This could be 64 ( 6 bits needed) (11 11112=6510)
2.
L1 is represented by
the bit 0 and L2 is represented by the bit 1
3.
RIGHT is represented by
the bit 0 and LEFT by the bit 1
4.
The number of CLICKS is
represented by 7 bits ( 111 11112=12710)
Our first and second lines
of code would be
000000 0 0 0000001
000001 1 1 0000010
Our program would also have
to start with the arm in the original rest position. We would need to have a
special line of code to return the arm to the rest position.