OUR WALKING ROBOT 2001
PROJECT ID:1A01182
NAME: 43ST aka dicky aka Forrest GuMP
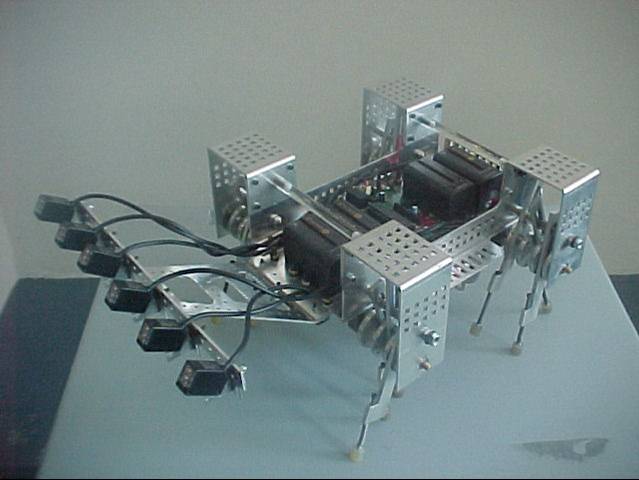
Our project is to develop a twelve legged robot. It is designed to complete a 23.56m track in the shortest time possible. It will manoeuvre by sensing a path defined by reflective tapes on the track. A micro-controller acts as a brain to control the motors for the manoeuvre.
Project members:
Ang Yixian ( programmer ).
Kong Say Teck,Ivan ( designer for electric board, all electric stuff ).
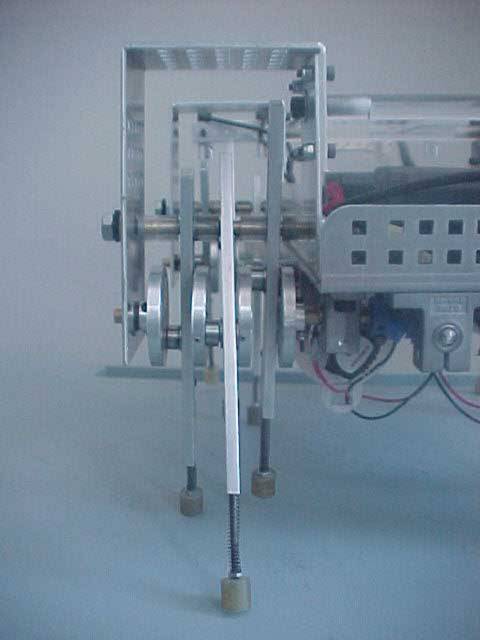
Tan Lien Hong ( designer for legs, cam & fabrication ).
Yeo Chuan Ming ( designer for body, shields & fabrication).
Project supervisors:
Mr Andy Kwek Soo Keng
Mr Lee Keng Hong