Chapter Six
Conclusions and Recommendations
6.1 Conclusions drawn from the Spheresolver Code problems
Figure 6 (below) illustrates a surface map of objective function value for sample problem 1. Surface data were plotted on a 2-degree grid from 0 to 360 in both longitude and latitude, resulting in a skewed (projected) plot, with more data points being plotted in the polar regions than in the equatorial. No plotting programs were available to wrap the surface around a sphere, and the plot contains data interpolated from x,y (long,lat) coordinates which exist outside of the continuous spherical surface. The plot clearly shows the optimal approximate point (the hole) and its antipode (the peak) as the minimum and maximum solution point values for the objective function. This plot was made with data from the first sample problem with the objective function values cubed (for additional vertical clarity), and does not illustrate point objective function values at the demand points. It is relatively instructive (with differing colors representing contours of objective function value) as to the optimal solutions for different problems. All of the tested sample problems returned similar surface plots on a spherical scale. "Interpolation" data interpreted by the plotting program show areas (the corner elements of Figure 6) that are outside of the surface of the sphere, and should be ignored. A proper view of this plot would show only a 180x180 grid, but program (and user) limitations prevented this; still, the plot shows the general solution for a problem set with a single, very global minimum point well (even though the problem is a B1 case with potential local minima, they do not appear significant in this case).
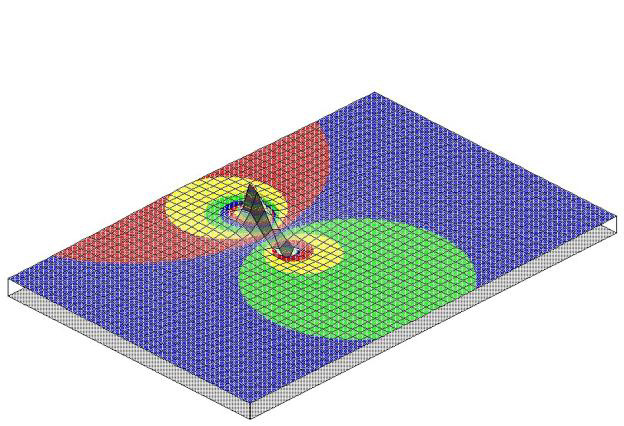
Figure 6. Surface Map (skewed planar projection) for Sample Problem 1
It appears that the projection method, while not always useful (particularly in the larger problems already noted to have convexity problems), can still offer a reasonable alternative starting point for more detailed searches in some cases.
6.2 Conclusions drawn from the Great Circle Arc Norm substitution into the Weiszfeld Algorithm
Further investigations of this approach are not recommended until (if or when) alternative direct solution methods for the Weber problem are found which are not based on differentiation of the distance norms. Our early thoughts on this problem were that it would not succeed, but the ease of the example was irresistible and I felt documentation on it's failure would be interesting.
6.3 Recommendations for future research
This thesis has not attempted to exhaustively search for global or local minima for each problem set in this research. Further work using similar approaches may attempt to find better answers when the problems are set in the polar regions (as in problem 17, where the method worked less-than-spectacularly), or to compute more closely the objective function values around the projected points to refine the 'goodness' of these approximate solutions.
A proof of the projected point solution versus global or local minima solution points, or to what degree the proximity of demand points to a projected point affects the projected point solution, may prove useful in some coordinate system applications.
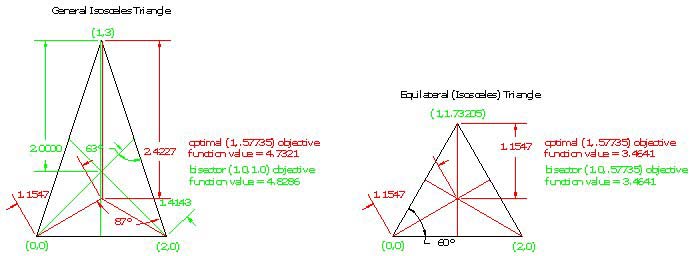
Figure 7. Weber Solutions for Isosceles Triangles
During defense of this thesis, an uninvestigated question was raised. The optimal L2 Weber solution for 2 equally-weighted points is halfway between the points, and for an equally-weighted equilateral triangle the optimal solution is also the centroid of the triangle. The centroid is defined as the intersection of the medians of the triangle, and these only coincide with the vertices' angular bisectors for an equilateral triangle (as shown in Figure 7, where a general isosceles triangle is shown with it's objective function values calculated at both the centroid and the optimal point). It might be of some use to know whether an equally-weighted spherical equilateral triangle also exhibited the property of it's centroid matching it's optimal minisum point. Other investigations involving spherical manifestations of planar geometric shapes could be pursued for certain applications (perhaps, equidistant placements of seaborne radar installations or communications relay gear where line-of-sight questions were important).
Investigation of the multimodality of the distance metric for spherical covering circles larger than Π/4 radians in radius might produce interesting results applicable to new solution methodologies or elimination of some areas within the circle as potentially minimum.
A hard engineering look at restricted spaces and at costs involved in navigating around those restricted spaces in order to find a good solution is a realistic problem that should be looked at; it is probably only solvable in general terms (using approximations) based on the potentially infinitely complex variables being introduced (variable cost functions for terrain, complex geometric shapes of potentially restricted regions, costs of actually locating a facility at different points, and human factors such as politics). This would be far more useful in real terms than a mathematical solution to the problem we have looked at, but would not be a pure knowledge investigation.
Finally, the research used only the Cartesian and right ascension-declination spatial systems in looking at this problem. Although these are the two major systems used while looking at both spherical (non-rotational surface) and spatial problems, other measurement systems may work better for this type of analysis (as the projected centroid provides a decent starting point solution in some cases).
6.4 Final comments
As noted in Section 5.3, the degree of accuracy with which the global solution is computed is dependent on the application. This has been an engineering look at a mathematical problem with real-world (engineering) applications, and engineering economics must determine whether it is more beneficial to find the actual mathematical solution or to balance that solution's slight advantages against the time/cost savings involved in finding a 'good' solution subject to the externalities not considered in the mathematical model's statement. Our simple look at the problem shows that approximate solutions to the problem can be extremely easy to find, and that it can be extremely difficult to make those more precise without spending more computer time than is probably reasonable to find a better solution. In other words (from the engineer), is it more important to determine pi to a million decimal points, or know that a really good approximation for human needs is 3.14159265?
Next Page
Back to Index