|
SomosIQ Derechos Reservados. 2005. Para la reproducción total o parcial de los artículos de esta publicación deberá citarse la fuente.
|
AUTOMATIZACIÓN Y CONTROL DE PROCESO diseño y construcción de un ROBOT SEXTOPODO AUTOMATA PROGRAMABLE: POCHITRONIC
Por: MCs. Jorge Alberto Pardo Torres
Construcción del Equipo: Alcudia Pascual Ángela, Alfonso Vidal Jesús R., Hernández De La Cruz Cecilia, León Matías Rodrigo A., Martines Pérez Georgina T., Quintero López Patricia, Wilson Ramón Guillermo.
Las construcciones de Robots son una de los más interesantes resultados de los avances tecnológicos de todos los días. Es una máquina controlada por un ordenador y programada para moverse, manipular objetos y realizar trabajos a la vez que interacciona con su entorno. Los robots son capaces de realizar tareas repetitivas de forma más rápida, barata y precisa que los seres humanos. El término procede de la palabra checa robota, que significa 'trabajo obligatorio'; fue empleado por primera vez en la obra teatral de 1921 R.U.R. (Robots Universales de Rossum) por el novelista y dramaturgo checo Karel Čapek. Desde entonces se ha empleado la palabra robot para referirse a una máquina que realiza trabajos para ayudar a las personas o efectúa tareas difíciles o desagradables para los humanos.
Las máquinas automatizadas ayudarán cada vez más a los humanos en la fabricación de nuevos productos, el mantenimiento de las infraestructuras y el cuidado de hogares y empresas. Los robots podrán fabricar nuevas autopistas, construir estructuras de acero para edificios, limpiar conducciones subterráneas o cortar el césped. Ya existen prototipos que realizan todas esas tareas.
El Pochitronic es un manipulador reprogramable y multifuncional diseñado para mover material, partes, herramientas o bien dispositivos especializados para desempeñar una variedad de labores a través de movimientos diversos programados.
Este desarrollo tecnológico fue incubado en el Tecnológico de Villahermosa.
Con estas estrategias se pretenden aumentar el índice de habilidades innovadoras y creativas de la Comunidad Tecnológica y Desarrollar tecnologías que apoyen el desarrollo armónico de la región pretendiendo ser un catalizador para crear individuos comprometidos con el Tecnológico y con la comunidad.
Tecnológico de Villahermosa deberá ser percibido como una universidad que no sólo se preocupa por el desarrollo científico sino también por el de la comunidad.
AUTOMATIZACIÓN Y CONTROL DE PROCESO: SEXTOPODO AUTOMATA POCHITRONIC
Director del Proyecto: MCs. Jorge Alberto Pardo Torres.
Construcción: Alcudia Pascual Ángela, Alfonso Vidal Jesús R., Hernández De La Cruz Cecilia, León Matías Rodrigo A., Martines Pérez Georgina T., Quintero López Patricia, Wilson Ramón Guillermo.
Alumnos de Control de Proceso de la Carrera de Ingeniería Química del Tecnológico de Villahermosa.
INTRODUCCIÓN.
Las construcciones de Robots son una de los más interesantes resultados de los avances tecnológicos de todos los días. Es una máquina controlada por un ordenador y programada para moverse, manipular objetos y realizar trabajos a la vez que interacciona con su entorno. Los robots son capaces de realizar tareas repetitivas de forma más rápida, barata y precisa que los seres humanos. El término procede de la palabra checa robota, que significa 'trabajo obligatorio'; fue empleado por primera vez en la obra teatral de 1921 R.U.R. (Robots Universales de Rossum) por el novelista y dramaturgo checo Karel Čapek. Desde entonces se ha empleado la palabra robot para referirse a una máquina que realiza trabajos para ayudar a las personas o efectúa tareas difíciles o desagradables para los humanos.
Las máquinas automatizadas ayudarán cada vez más a los humanos en la fabricación de nuevos productos, el mantenimiento de las infraestructuras y el cuidado de hogares y empresas. Los robots podrán fabricar nuevas autopistas, construir estructuras de acero para edificios, limpiar conducciones subterráneas o cortar el césped. Ya existen prototipos que realizan todas esas tareas.
Una tendencia importante es el desarrollo de sistemas microelectromecánicos, cuyo tamaño va desde centímetros hasta milímetros. Estos robots minúsculos podrían emplearse para avanzar por vasos sanguíneos con el fin de suministrar medicamentos o eliminar bloqueos arteriales. También podrían trabajar en el interior de grandes máquinas para diagnosticar con antelación posibles problemas mecánicos.
Puede que los cambios más espectaculares en los robots del futuro provengan de su capacidad de razonamiento cada vez mayor. El campo de la inteligencia artificial está pasando rápidamente de los laboratorios universitarios a la aplicación práctica en la industria, y se están desarrollando máquinas capaces de realizar tareas cognitivas como la planificación estratégica o el aprendizaje por experiencia. El diagnóstico de fallos en aviones o satélites, el mando en un campo de batalla o el control de grandes fábricas correrán cada vez más a cargo de ordenadores inteligentes.
ROBOTICA
A través del tiempo, el hombre ha buscado nuevas formas de mejorar sus procesos productivos A partir de la segunda mitad del siglo XX se desarrolla tecnología que permite automatizar estos procesos. La primera impresión que se nos viene a la mente es autómata, automatización, es decir robot, o bien palabras asociadas a ésta como lo es robótica.
Existen muchas formas de definir el término robot, podemos utilizar la definición de 1979 del Robot Institute of América, que dice:
Es un manipulador reprogramable y multifuncional diseñado para mover material, partes, herramientas o bien dispositivos especializados para desempeñar una variedad de labores a través de movimientos diversos programados.
Arquitectura de un robot
El concepto de arquitectura de un robot se refiere primordialmente al software y hardware que definen el ámbito de control de una máquina de este tipo.
La nueva tendencia para el desarrollo de arquitectura robótica se ha enfocado en lo que podemos nombrar sistemas reactivos o bien basados en el entorno, esto quiere decir que los robots tendrán la capacidad de reaccionar sin necesidad de la intervención humana ante ciertas situaciones de eventual peligro para la máquina. Un claro ejemplo de este tipo de diseño es el robot utilizado para la exploración en Marte, el cual mediante sensores determina el ambiente que lo rodea y puede tomar la decisión más acertada acerca de la ruta u operación a realizar. Todo esto está motivado por el tiempo que tomaría en llegar a la superficie marciana las órdenes desde la Tierra.
La robótica es un tema fascinante, mezcla conceptos de todas las ramas de la ingeniería, pero su uso principal se da en los procesos productivos, desde la selección automatizada de piezas hasta el ensamble de automóviles! es decir todos aquellos que son el área de estudio de la ingeniería industrial. La era industrial de la robótica de desarrollo se impulsó en las últimas décadas
El beneficio que se obtiene con el uso de estas máquinas es mejorar el nivel de productividad de las empresas, factor sumamente importante en un mundo globalizado, en dónde el lograr llevar el producto de mejor calidad al mejor precio le permitirá dominar las ventas en el mercado mundial
Los adelantos en el campo de la robótica industrial siempre van ha influir en los procesos productivos y viceversa; al desarrollarse un nuevo circuito o procesador inmediatamente se puede vislumbrar su efecto en el posible mejoramiento de un proceso industrial o bien las necesidades de un proceso productivo generan nuevas tecnologías.
INTELIGENCIA ARTIFICIAL
Inteligencia artificial, término que, en su sentido más amplio indicaría la capacidad de un artefacto de realizar los mismos tipos de funciones que caracterizan al pensamiento humano. La posibilidad de desarrollar un artefacto así ha despertado la curiosidad del ser humano desde la antigüedad; sin embargo, no fue hasta la segunda mitad del siglo XX, cuando esa posibilidad se materializó en herramientas tangibles.
Capacidad de Pensar e Inteligencia Artificial
La capacidad de pensar de los robots está lejos de ser una realidad, los esfuerzos para imitar el pensamiento humano se han centrando alrededor de lógica basada en reglas, es decir respuestas afirmativas o negativas y los datos son almacenados en formato binario —unos y ceros- para ser manipulado mediante reglas preprogramadas; la mayoría de los llamados cerebros robots” están basados también en reglas y muy frecuentemente se encuentran codificadas en un único microchip.
AUTOMATIZACIÓN
Sistema de fabricación diseñado con el fin de usar la capacidad de las máquinas para llevar a cabo determinadas tareas anteriormente efectuadas por seres humanos, y para controlar la secuencia de las operaciones sin intervención humana. El término automatización también se ha utilizado para describir sistemas no destinados a la fabricación en los que dispositivos programados o automáticos pueden funcionar de forma independiente o semi-independiente del control humano.
Automatización en las industrias
Gracias a los avances de la tecnología y de la automatización, un único trabajador es capaz de controlar las actividades de una fábrica entera mediante un complejo panel de control. En la imagen vemos a un trabajador observando los robots de una línea de montaje mientras realizan tareas repetitivas en una planta metalúrgica. La ventana de cristal permite al operador vigilar la aparición de posibles problemas, y al mismo tiempo le protege de los ruidos, el calor y los vapores tóxicos.
LENGUAJE BASIC
El lenguaje BASIC (acrónimo de Código de Instrucciones Simbólicas de Uso General para Principiantes) fue desarrollado en el Dartmouth College a principios de la década de 1960 y está dirigido a los usuarios de ordenador no profesionales. Este lenguaje se universalizó gracias a la popularización de los microordenadores en las décadas de 1970 y 1980. Calificado de lento, ineficaz y poco estético por sus detractores, BASIC es sencillo de aprender y fácil de utilizar. Como muchos de los primeros microordenadores se vendieron con BASIC incorporado en el hardware (en la memoria RaM), se generalizó el uso de este lenguaje.
Controlador y microcontrolador.
Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos. Por ejemplo, el controlador que regula el funcionamiento de un horno dispone de un sensor que mide constantemente su temperatura interna y, cuándo traspasa los límites prefijados, genera las señales adecuadas que accionan los efectores que intentan llevar el valor de la temperatura dentro del rango estipulado.
Un microcontrolador es un circuito integrado de alta escala de integración que incorpora la mayor parte de los elementos que configuran un controlador.
INSTRUMENTACIÓN INDUSTRIAL
Es el conocimiento de la correcta aplicación de los equipos encaminados para apoyar al usuario en la medición, regulación, observación, transformación, ofrecer seguridad, etc., de una variable dada en un proceso productivo.
El sistema de radio control, control remoto o mando a distancia, data de varias décadas atrás, primeramente con la aparición de deficientes y pesados equipos de uno o dos canales (algunos de bulbos) que operaban con pulsos, no eran proporcionales, es decir, tenía el canal tres puntos básicos, centrado, derecha e izquierda.
SERVOMOTORES
Los servos son un tipo especial de motor que se caracterizan por su capacidad para posicionarse de forma inmediata en cualquier posición dentro de su rango de operación. Para ello el servo espera un tren de pulsos que se corresponden con el movimiento a realizar. Están generalmente formados por un amplificador, un motor, la reducción de engranaje y la realimentación, todo en un misma caja de pequeñas dimensiones. El resultado es un servo de posición con un margen de operación de 1800 aproximadamente.
Funcionamiento del servo
El control de un servo se imita a indicar en que posición se debe situar. Estas “ordenes” consisten en una serie de pulsos. La duración del pulso indica el ángulo de giro del motor. Cada servo tiene sus márgenes de operación, que se corresponden con el ancho del pulso máximo y mínimo que el servo entiende. Los valores más generales corresponde con valores entre 1 ms y 2 ms, que dejarían al motor en ambos extremos. Estos valores suelen ser los recomendados, sin embargo, es posible emplear pulsos menores de 1 Ms o mayores de 2 nis, pudiéndose conseguir ángulos mayores de 1800. El periodo entre pulso y pulso no es critico, e incluso puede ser distinto entre uno y otro pulso. Se suelen emplear valores entre 10 Ms y 30 mt Si el intervalo entre pulso y pulso es nferior al mínimo, puede interferir con la temporizaciñn interna del servo, causando un zumbido, y la vibración del brazo de salida. Si es mayor que el máximo, entonces el servo pasará a estado dormido, entre pulsos. Esto provoca que se mueva con intervalos pequeños.
CONSTRUCCION DEL ROBOT
El robot esta construido de aluminio y plástico, las partes que se van a diseñar y construir e integrar son: el chasis, construcción de las piernas centrales para el montaje de los servos, el tablero principal de controles y el tablero del sensor infrarrojo.
TABLERO PRINCIPAL DE CONTROLES
Esta parte cuenta con los principales circuitos de controles para la construcción de robots y la construcción de tableros de circuito.
La tabla 5 lista todas las partes necesarias para construir un tablero de control.
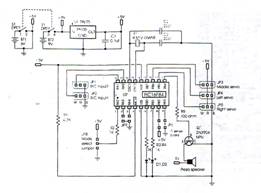
Todas las funciones de robots son controlados por un microchip PIC 16F84 microcontrolador. El microcontrolador esta depositado en un chip de la computadora. Esto hace posible que elimine un largo proceso de sistemas que podría ser más de los que se requiere. Los controladores sirven como cerebro a los robots, controlan y manejan todas sus funciones, sensores y reflejos. El microcontrolador 16F84 es usado a 4MHZ y operados a 5V producidos de un regulador de voltaje de batería a 78l05 con una fuente de 9V. Los servos son alimentados por un separador de 6 V DC. La energía es separada por aisladores de ruidos de servidores y guardados en un regulador de 5 V en el procesador cuando los 6 V sustituyen al servidor. Esto es incapaz para que los robots funcionen por un largo tiempo de cargas.
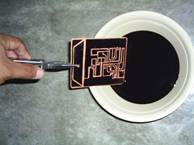
FABRICACION DEL TABLERO DEL CIRCUITO IMPRESO
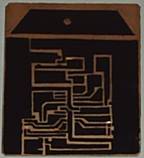
Para hacer este tablero es fácil solo hay que guiarse por las figuras 2.13. Las dimensiones ideales son de 4 x 6 plg.
Fig. 2.13. Tarjeta de circuito impreso
Fig. 2.14 Cloruro férrico y piezas para la construcción del tablero principal de controles.
A continuación se enumeran los pasos para hacer el tablero del circuito impreso:
1.- Se compra la tarjeta de circuito impreso y se corta a las medidas indicadas anteriormente.
2.- Dibujar el circuito mostrado en la Fig.2.13.
3.- Proteger el área de la lámina con plumón de aceite permanente (se utilizó de color negro).
4.- Se sumerge en cloruro férrico con un tiempo aproximado de 15 min.
6.- Después, sacarlo del recipiente y posteriormente se limpia con alcohol y después se empieza a taladrar.
7.- Introducir las piezas que lo conforman según la Fig.2.14. y posteriormente soldarlas.
Fig. 2.15. Partes soldadas del circuito. CONSTRUCCION DE LAS TENAZAS DEL ROBOT
Fig. La figura muestra la forma de ensamble de las piezas que conforman la tenaza.
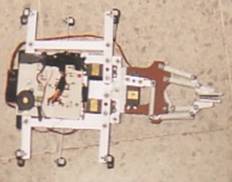
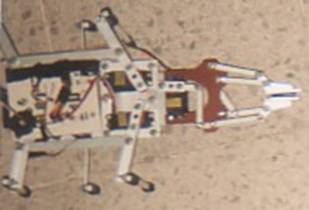
Fig. Figura del robot ya terminado con 4 servomotores y con una tenaza.
Fig.En esta figura se muestra el robot autómata ya terminado, con cuatro servomotores.
RADIOCONTROL
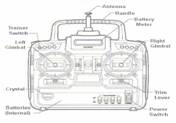
Hasta ahora, el robot ha sido operado autónomamente bajo nuestra cognición. Esta parte crea una interfase ideal entre un modelo del transmisor y receptor de aeroplanos para un control humano del robot. El beneficio de usar un radiocontrol de aeroplano de rango grande es que el robot puede ser guiado a lugares remotos con exactitud, y otras funciones mediante unas tenazas o un videocámaras que pueden ser adicionadas y controladas. Un control remoto permite que nuestro robot caminador tenga muchos usos, como la localización de sobrevivientes en áreas de desastres, seguridad de los trabajadores en las minas, reconocimiento militar y aplicaciones de espionaje. El modelo del sistema de radiocontrol de aeroplanos que usamos para controlar el robot es de la marca FUTABA. En la Fig. se muestra el transmisor y el receptor. Este radiocontrol nos permite transmitir hasta una distancia de 1 mi y opera a 72 MHZ de rango AM.
EMSAMBLE FINAL
Ahora el cuerpo del robot, los controles principales, y el sensor infrarrojo se han terminado. La tabla siguiente enlista las partes necesarias para el ensamble final.
Tabla 6. Lista de partes para ensamble final.
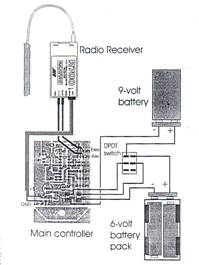
En la siguiente Figura se muestra la forma de conectar el radiorreceptor.
Fig.. Diagrama de la Conexión del radiorreceptor.
En estas fotos se muestra al robot cogiendo con sus tenazas una botella.
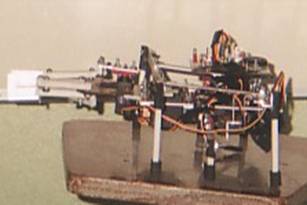
En estas fotos se muestra el cuerpo del robot.
El radiocontrol junto con el robot
En esta foto podemos ver las conexiones que tiene el robot. En el siguiente segmento se muestran las facturas de los artículos que se compraron.
BIBLIOGRAFÍA
REFERENCIAhttp://autric.com/Microbotica%20y%20Mecatronica/n_reaccion_con_up(2).htm
Biblioteca de Consulta Microsoft ® Encarta ® 2005. © 1993-2004 Microsoft Corporation. Reservados todos los derechos. INSECTRONICS, BUIL YOUR OWN WALKING ROBOT, Karl Williams, Ed. McGraw-Hill. 2003.
SomosIQ Derechos Reservados. 2005. Para la reproducción total o parcial de los artículos de esta publicación deberá citarse la fuente.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||