|
A
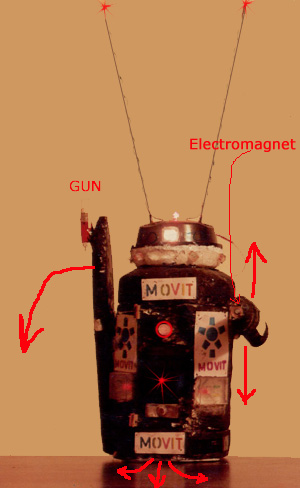
robot inspired by a robo character "R2D2" in Star wars. This robot
had 2 arms : one with an electromagnet and the other with a gun. the head
could rotate , had a flash lamp in the head , could move in any direction ,
the base was driven with 2, 3 volt toy dc motors with gears (self made). |
|
|
Movit -2 an arm robot with a gripper hand . This could in move in 360
degrees and could lift objects by holding them . Movit -2 was also interfaced
with Sinclair computer to do automated jobs using the LOGO programming
language . |
|
|
Movit - 4 a modified version of Movit -2 this had an elbow
joint and a head made out of View Master to give it decent look. |
|
|
OPTRIX -the master piece built by me in 12 th Grade .This was
indigenously designed and developed exclusively for B.M.Birla Planetarium. OPTRIX was 5 feet tall.This robot could move in all directions. It contains a multi functional arms. The right arm could move efficiently at its shoulder, elbow, rotate the wrist clockwise and anti clockwise and grip any object with the help of 2 fingers. The robot could be controlled in 3 modes automatic, semi automatic and manual mode. In the semi automatic mode the robot would change its direction on a clap. In the manual mode the robot is controlled through switches.
|
|
|
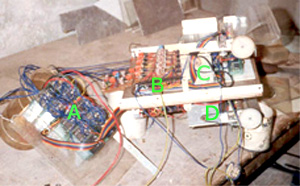
Here shown is the Brain of OPTRIX . A: the relay bank B: Optical Circuits C & D the drive system Here a transparency is used with black tape marked , according to the black tape the optical circuits activated the relays which in turn drive the motors. |
|
|
The robot can be divided into the base, the torso, the control
system. The base
supports the whole robot on 4 wheels of which 2 are driven by 12 volt
D.C.motors (Maruti wiper wheels) through belts. The base also contains power
supply and charging system of the whole machine The torso also has a tape recorder and speaker which can be switched on according to a program. To make the robot more attractive a head was placed on the torso. This head could move left and right and the lips was synchronized to move according to the recorded message. |
|
|
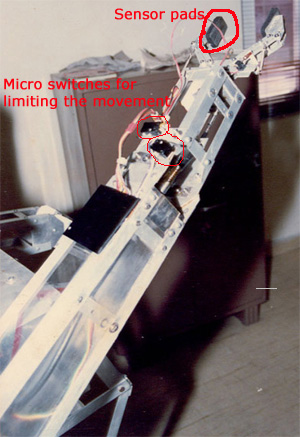
The arm can pick up any object from its tray and place it elsewhere.
Each movement was driven by a separate motor and these were placed in the torso.
All the functions have micro switches at their extremes to provide feedback
to the control system |
|