9- Vectores en R2:
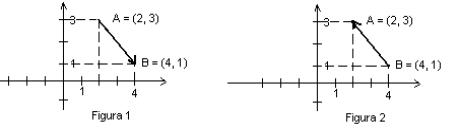
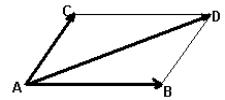
En la geometría clásica, un vector
es una flecha o segmento dirigido, es decir, un segmento en el cual distinguiremos
un origen y un extremo, más precisamente, para definir un vector, basta dar
un par ordenado de puntos del plano el primero de los cuales es el origen y
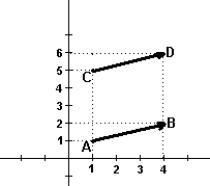
el segundo el extremo. Por ejemplo, si A = (2, 3) y B = (4, 1), en la figura
1 representamos el vector ![]() y en la figura 2, el vector
y en la figura 2, el vector ![]() .
.
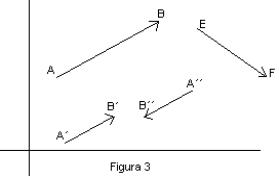
Decimos que dos vectores tienen la misma dirección si se encuentran sobre rectas paralelas. Como toda recta es paralela a sí misma, dos vectores que se encuentran sobre la misma recta, tienen la misma dirección.
En la figura 3 ![]() ,
, ![]() ,
, ![]() , tienen la misma dirección; en cambio,
, tienen la misma dirección; en cambio, ![]() y
y ![]() tienen distinta dirección.
tienen distinta dirección.
Si dos vectores están sobre la misma recta, y fijamos una orientación
sobre esa recta, es decir, decidimos cuál es la derecha y cuál es la izquierda
en la recta, diremos que los vectores tienen distinto sentido
si el extremo de uno de ellos está a la derecha de su origen y el extremo del
segundo está a la izquierda de su origen. En la figura 4, ![]() y
y ![]() tienen distinto sentido, mientras que
tienen distinto sentido, mientras que ![]() y
y ![]() tienen el mismo sentido
tienen el mismo sentido
![]()
Si los dos vectores se encuentran sobre rectas paralelas, pero distintas, decimos que tienen el mismo sentido si la recta que une a los extremos deja a los orígenes contenidos en el mismo semiplano. En caso contrario tienen distinto sentido.
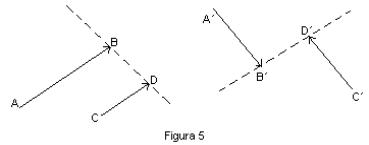
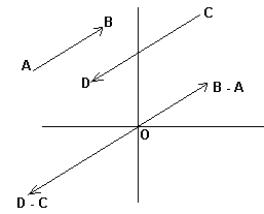
En la figura 5 ![]() y
y ![]() tienen el mismo sentido y
tienen el mismo sentido y ![]() y
y ![]() tienen distinto sentido. Solo se puede comparar el sentido de dos vectores si
estos tienen la misma dirección.
tienen distinto sentido. Solo se puede comparar el sentido de dos vectores si
estos tienen la misma dirección.
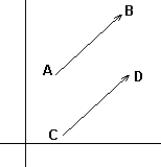
Dos vectores se dicen equivalentes si tienen la misma dirección, longitud y sentido.
En la figura 6, los vectores
![]() y
y ![]() son equivalentes.
son equivalentes.
10- Suma de vectores:
Si dos vectores tienen el mismo origen A, se pueden sumar. El resultado de sumar dos vectores con origen A es siempre otro vector con origen A. Para hacer la suma en forma geométrica procedemos como sigue:
(i)
Si los vectores ![]() y
y ![]() tienen el mismo sentido y están sobre la misma recta y
tienen el mismo sentido y están sobre la misma recta y ![]() =
= ![]() +
+ ![]() , entonces el vector
, entonces el vector ![]() tiene el mismo sentido y esta sobre la misma recta que
tiene el mismo sentido y esta sobre la misma recta que ![]() y
y ![]() y la longitud de
y la longitud de ![]() es la suma de las longitudes de
es la suma de las longitudes de ![]() y
y ![]() .
.

(ii)
Si los vectores ![]() y
y ![]() tienen distinto sentido y están sobre la misma recta y
tienen distinto sentido y están sobre la misma recta y ![]() =
= ![]() +
+ ![]() , entonces el vector
, entonces el vector ![]() esta sobre la misma recta que
esta sobre la misma recta que ![]() y
y ![]() y la longitud de
y la longitud de ![]() es la diferencia entre las longitudes del de mayor longitud y del menor.
El sentido de
es la diferencia entre las longitudes del de mayor longitud y del menor.
El sentido de ![]() es el del sumando de mayor longitud.
es el del sumando de mayor longitud.

(iii)
Si los vectores tienen el mismo origen pero están sobre rectas distintas,
se procede mediante la llamada “ley del paralelogramo” que consiste en trazar
un paralelogramo tal que dos de sus lados sean ![]() y
y ![]() , el vector suma
, el vector suma ![]() =
= ![]() +
+ ![]() , tiene su extremo D en el vértice opuesto a A en el paralelogramo.
, tiene su extremo D en el vértice opuesto a A en el paralelogramo.
11-
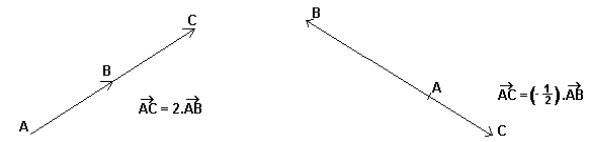
Producto de un vector ![]() por un número real k:
por un número real k:
Si k Î
R, el producto k. ( ![]() ) es un vector con origen en A, cuya longitud se obtiene multiplicando
la longitud de
) es un vector con origen en A, cuya longitud se obtiene multiplicando
la longitud de ![]() por el valor absoluto de k. Además k.(
por el valor absoluto de k. Además k.( ![]() ) está en la misma recta que
) está en la misma recta que ![]() y tiene igual sentido si k > 0 y sentido contrario si k < 0.
y tiene igual sentido si k > 0 y sentido contrario si k < 0.
12- Expresión algebraica para la suma de dos vectores:
El método de Descartes que consiste en identificar los puntos del plano con pares ordenados de números reales, nos permite realizar la suma de dos vectores en forma algebraica.
Consideremos dos vectores
con el mismo origen ![]() y
y ![]() dado que
dado que ![]() +
+ ![]() es un vector con origen A, para hallar la suma, basta encontrar su extremo.
es un vector con origen A, para hallar la suma, basta encontrar su extremo.
Como se puede apreciar en la figura, el extremo de esta suma es B + C – A.
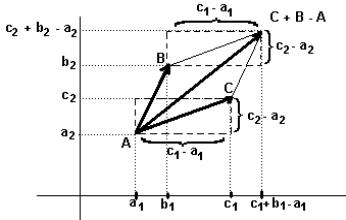
Luego ![]() +
+ ![]() =
= ![]() (1)
(1)
13- Expresión algebraica del producto de un vector por un escalar:
Consideremos un número real
k. Sea ![]() = k.
= k. ![]() . Obtendremos las coordenadas del extremo D a partir de la siguiente figura:
. Obtendremos las coordenadas del extremo D a partir de la siguiente figura:
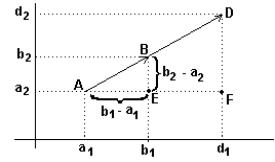
Dado que los triángulos rectángulos
![]() y
y ![]() tienen un ángulo común, son semejantes y, por lo tanto, sus lados son
proporcionales. Por la definición dada de la multiplicación entre un vector
y un número real, la longitud de
tienen un ángulo común, son semejantes y, por lo tanto, sus lados son
proporcionales. Por la definición dada de la multiplicación entre un vector
y un número real, la longitud de ![]() es k
es k
veces la longitud de
![]() . Siendo los triángulos
. Siendo los triángulos ![]() y
y ![]() semejantes se obtiene que:
semejantes se obtiene que:
d1
– a1 = longitud de ![]() = k.(longitud de
= k.(longitud de ![]() ) = k.( b1 – a1)
) = k.( b1 – a1)
de donde: d1= k.( b1 – a1) + a1
Análogamente: d2= k.( b2 – a2) + a2
En consecuencia: D = k.( B – A) + A
En resumen: k.
![]() =
= ![]() (2)
(2)
![]()
14- Identificación de los puntos de R2 con los vectores de origen O = (0, 0):
Las fórmulas (1) y (2) vistas en las secciones 12 y 13, cuando A = O = (0, 0), se escriben:
![]() +
+ ![]() =
= ![]() (3)
(3)
k.
![]() =
= ![]() (4)
(4)
Gracias a (3)
y (4), vemos que la adición y la multiplicación por números de puntos de R2
corresponden geométricamente a la adición y multiplicación por números de vectores
con origen O = (0, 0) y permiten identificar cada punto AÎ
R2 con el vector ![]() . En virtud de esta identificación, en adelante, indicaremos al vector
. En virtud de esta identificación, en adelante, indicaremos al vector
![]() como al punto A y también nos referiremos al punto A como al vector A.
Es claro que la identificación hecha entre los puntos de R2 y los
vectores con origen O = (0, 0), no se puede hacer si los vectores tienen un
origen A ¹ (0, 0).
como al punto A y también nos referiremos al punto A como al vector A.
Es claro que la identificación hecha entre los puntos de R2 y los
vectores con origen O = (0, 0), no se puede hacer si los vectores tienen un
origen A ¹ (0, 0).
15- Ejemplo: Sean A = (1, 1); B = (3, 2); C = (1, 3); k = 3.
![]() +
+ ![]() =
= ![]() =
= ![]()
3. ![]() =
= ![]() =
= ![]()
Se deja a cargo del lector realizar las representaciones gráficas.
16- Condición necesaria y suficiente para que dos vectores sean equivalentes:
Sea O = (0, 0), es claro
que cada vector ![]() tiene un único vector equivalente con
origen O al que llamaremos
tiene un único vector equivalente con
origen O al que llamaremos ![]() .
.
El cuadrilátero de extremos
O, A, B y P, tiene dos lados congruentes y paralelos, ![]() y
y ![]() , por lo tanto es un paralelogramo.
, por lo tanto es un paralelogramo.
Luego, como se puede apreciar
en la figura, ![]() +
+ ![]() =
= ![]() .
.
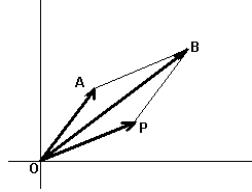
Utilizando la identificación entre los puntos del plano, y los vectores con origen O, A + P = B, con lo cual, P = B - A.
Supongamos que ![]() es otro vector equivalente a
es otro vector equivalente a ![]() , entonces,
, entonces, ![]() también es equivalente a
también es equivalente a ![]() , luego, P = D – C, en consecuencia:
, luego, P = D – C, en consecuencia:
Los
vectores ![]() y
y ![]() de R2 son equivalentes si y solo si B–A=D-C
de R2 son equivalentes si y solo si B–A=D-C
17- Ejemplo:
18- Paralelismo de vectores:
Sean ![]() y
y ![]() dos vectores de R2. Es claro que
dos vectores de R2. Es claro que ![]() y
y ![]() son paralelos si y solo si, sus equivalentes con origen O = (0, 0), B
– A y D – C, están en la misma recta que pasa por el origen. Esto es,
son paralelos si y solo si, sus equivalentes con origen O = (0, 0), B
– A y D – C, están en la misma recta que pasa por el origen. Esto es,
![]() es paralelo a
es paralelo a ![]() si y solo si, existe un número real k ¹
0, tal que D – C = k.(B – A).
si y solo si, existe un número real k ¹
0, tal que D – C = k.(B – A).
Claramente, si k > 0,
![]() y
y ![]() tienen el mismo sentido y, sentido opuesto si
tienen el mismo sentido y, sentido opuesto si
k < 0.
![]()