
DISEÑO E IMPLEMENTACIÓN DE UN EQUIPO
DE ROBOTS AUTÓNOMOS COOPERATIVOS
Autores :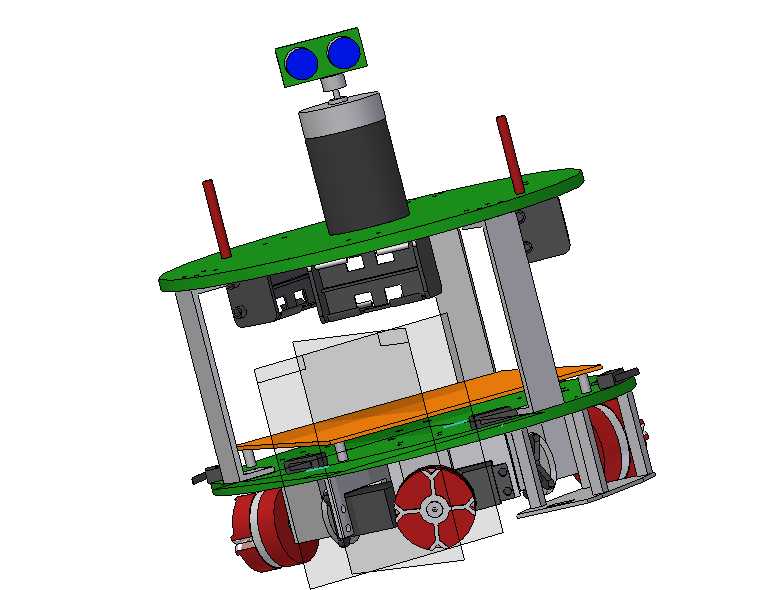
Pablo Baena Marín
Antonio Escamilla
Juan Felipe Obando V
Director:
Jorge Andrés Cock Ramirez,
Ing. Producción
Asesores:
Sergio Cock, Ing. Electrónico
Sergio Tamayo, Ing. Mecánico
Facultad de Ingeniería Eléctrica y Electrónica.
Tema del Proyecto.
Se diseñara un grupo de robots móviles, el cual constará de tres agentes independientes y autónomos interactuando entre ellos bajo una arquitectura de comportamiento cooperativo.
OBJETIVOS
GENERALES.
Estudiar, diseñar y construir un sistema de robótica cooperativa descentralizada
el cual cumpla y demuestre las ventajas de un sistema multi-agente en contraste
con un sistema de un solo agente.
OBJETIVOS ESPECÍFICOS.
1)
Conocer el funcionamiento de una arquitectura robótica cooperativa e implementar
esta en un sistema físico real.
2) Implementar un sistema que actúe y responda de manera autónoma ante cambios
en el entorno.
3) Desplazar un objeto entre varios robots, cumpliendo cierto patrón de
movimiento previamente establecido.
4) Desarrollar las funciones comportamentales como control de trafico,
manipulación conjunta y búsqueda.
5) Realizar un sistema físico-mecánico robusto que permita a cada uno de los
agentes robóticos interactuar y desplazarse sin errores.
6) Realizar una red inalámbrica en la cual se trabaje una estructura de acceso
al medio.
7) Permitir la observación y monitoreo en una central remota (PC), con
visualización de variables, estados y posición geográfica de cada uno de los
agentes.
8) Desarrollar software y Firm-ware para microcontroladores utilizando
lenguajes de alto nivel (lenguaje C).
9) Analizar el comportamiento de una entidad multi-agente y las ventajas o
desventajas que esta puede presentar.
10) Estudiar las diferentes arquitecturas aplicables a la robótica cooperativa y
sus propios aspectos que las caracterizan y las potencializan.
JUSTIFICACIÓN Y BENEFICIOS
DESARROLLO Y DISEÑO
AUTORES
BIBLIOGRAFIA
TESIS
(Planos Solid Edge 14 y fotos reales)
Diseños y/o Componentes Electrónicos usados
Videos de Ensamble de los robots
Videos de Pruebas (Comportamientos)