| 3 AVRIL 2003 |
 |
 |
 |
 |
 |
 |
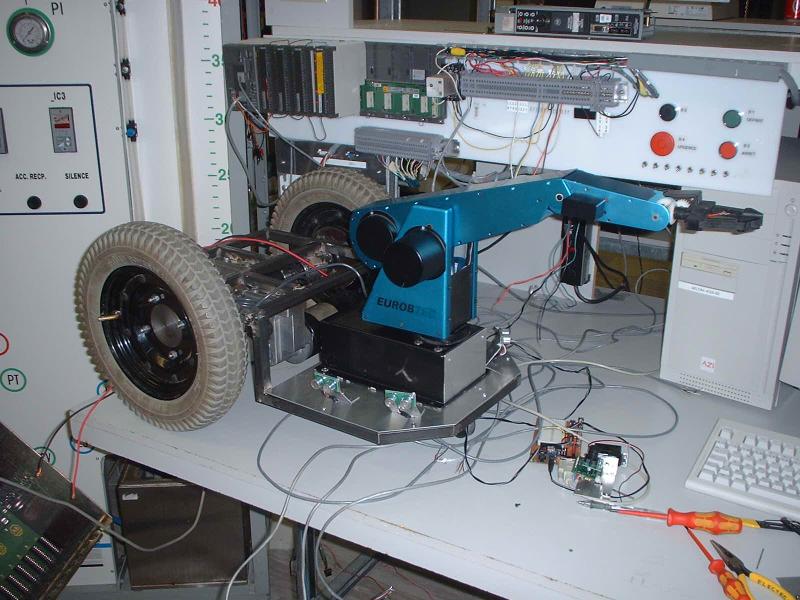
| Le robot tel qu'il est actuellement, on a install� les capteurs ultrasoniques, le bras et les encodeurs optiques. |
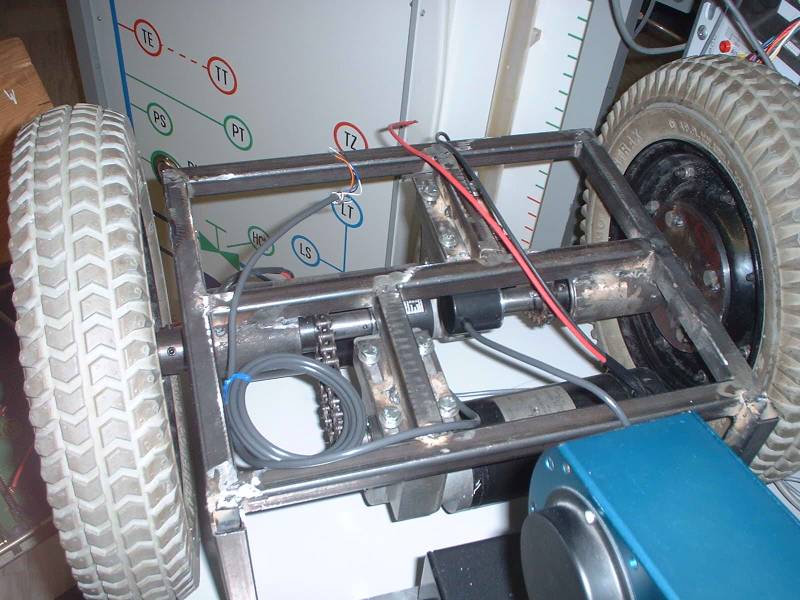
| L'assemblage des moteurs avec les encodeurs au bout des axes. La transmission se fait via des chaines. |
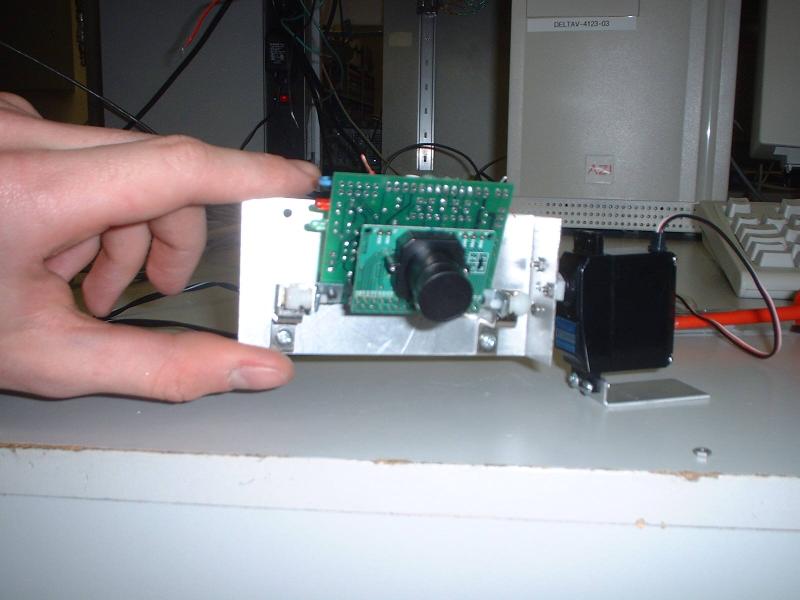
| Le dispositif d'orientation de la camera. Il s'agit d'un servomoteur Parallax en boucle ferm�e. |
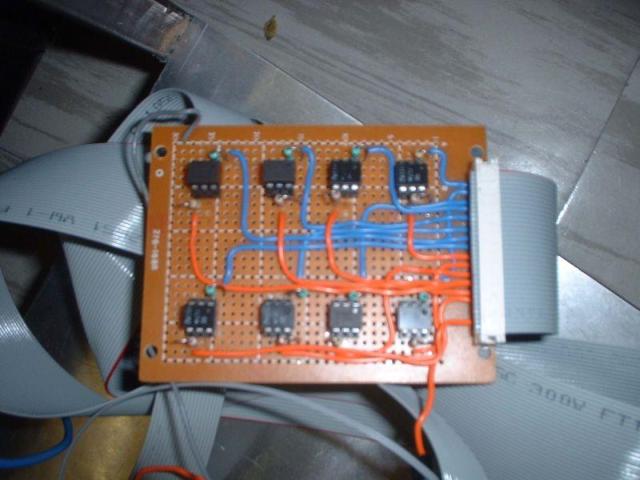
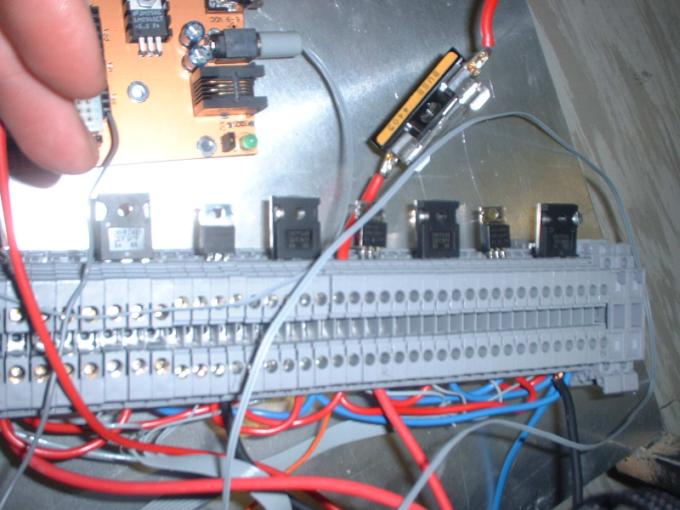
| Plaquette des optocoupleurs, pour les deux pont en H. |
| Les pont en H, faits avec des MOSFETS de puissance. |