Home page em construçăo!!! Aguardem.
JUNTAS
Para se estudar juntas! Torna-se necessário conhecer algumas premissas, tais como: tipos de robôs, suas configuraçőes e elementos que se autoligam para que as juntas possam ter seu papel efetivo.
TIPOS DE ROBÔS
1 - Inteligentes
2 - Controlados por PC
3 - Aprendizagem
4 - Manipuladores
1 - Săo manipulados por sistemas multifuncionais controlados por computador, săo capazes de interagir com seu ambiente através de sensores e de tomar decisőes em tempo real. Atualmente dedica-se grandes esforços no desenvolvimento desse tipo de robô.
2 - Săo semelhantes aos robôs inteligentes, porém năo tem a capacidade de interagir com o ambiente. Se estes robôs forem equipados com sensores e software adequado, se transformam em robôs inteligentes.
3 - Limitam-se a repetir uma sequęncia de movimentos, realizados com a intervençăo de um operador ou memorizadas.
4 - Săo sistemas mecânicos multifuncionais, cujo sensível sistema de controle permite governar o movimento de seus membros das seguintes formas:
a) manual
b) sequęncia variável.
ANATOMIA DOS ROBÔS
Construçăo física do corpo (base), antebraço (ombro/junta/elo), braço (cotovelo/junta/elo) e punho (junta/elo/orgăo terminal) da máquina. O corpo está ligado ŕ base, a qual está fixada ao piso, e o braço ligado ao corpo. Na extremidade está o punho. O punho consiste em inúmeros componentes que lhe permitem orientaçăo numa diversidade de posiçőes. Movimentos relativos entre os diversos componentes do corpo braço e punho săo proporcionados por uma série de juntas, que estăo autoligadas a seus elos. Esses movimentos de juntas geralmente envolvem movimentos rotativos ou deslizantes (elos). O conjunto formado pela base, braço e punho pode ser denominado "manipulador".
Ligado ao punho do robô está um órgăo terminal (ferramenta), o qual năo é considerado como parte da anatomia do robô. As juntas do braço e corpo săo usadas para posicionar o órgăo terminal, e as juntas do punho do manipulador săo usadas para orientar o órgăo terminal.
Dispőe-se de robôs industriais numa variedade de tamanhos, formas e configuraçőes físicas. A maioria dos robôs comercialmente disponiveis na atualidade possui as seguintes configuraçőes ou anatomias, básicas:
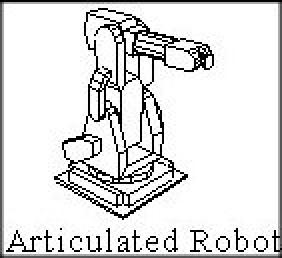
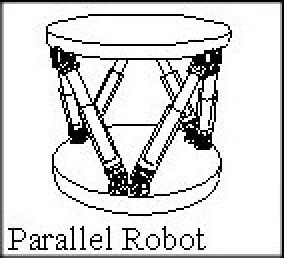
CONFIGURAÇŐES DE ROBÔS
Nas fotos abaixo săo mostradas os tipos de configuraçőes para robôs.
.

Home page criada em 16 de Junho de 2005 e modificada em 16 de Junho de 2005