(updated 11/07/01)
I figured I would build a simpler design to prove the concepts and code then I would venture forth to create the advanced controller.
This one uses a 12bit A/D with 2 inputs, the pressure sensor and accelerometer feed these inputs. The main processor will be a PIC16F84. I am using the 24xx256 memory chip to give me 16000 samples(8000 of each channel). This circuit will be my first surface mount work. I made the board using the laser printer toner transfer trick to make the traces on the board. I had to make it double sided to make it a resonable size.
I will make an external circuit(on a seperate circuit board) that will be the infrared tranceiver. This will also allow me to mount it on the tube body but still keep the IR receiver close to the IC that controls it.
Here is the schematic of the circuit I built.
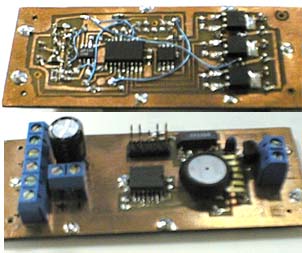
Here is a composit picture of the front and back of the board.
As you can see I had to add a few jumpers. Mostly because my programmer shorted out and fried the PIC so I had to replace the surface mounted part.
I'm still working on programming it. Got the A/D working and the EEPROM working. Just need to put it all together.
MODS
These are some of the modifications I had to make.
I had some issues connecting the altimeter to my Pocket PC.
As it turns out my computer is able to understand the psudo RS-232 signals from the microcontroller but my Pocket PC needs real voltage levels.
This is a schematic and layout drawing of the circuit I used to convert these levels. I just attached it in the cable.
Code
This is the code I used to program the PIC.Flights
These are some graphs of flight I have had
October 2001
This
was the first flight using dual deployment. The apogee charge was way late and
the main never went off. Good thing the NC fell off when the apogee charge went
off. I fixed the bug that allowed the velocity to add up too much before
launch.
November 2001
These are two graphs of the same flight. This time the apogee charge went off when it was supposed to but the main never went off. You can kinda see the red line at the edge where it hit the gound. It measured 12.8 G at that point. The right graph shows me carrying it up the hill to my car. The launch was on top of a hill. I found that the main didn't go off because I had two variables with the same name and the main delay never timed out. This delays the main chute 1/2 sec after apogee so the charges can't go off at the same time.