Front and back views
The flight computer will be installed in the forward electronics bay.
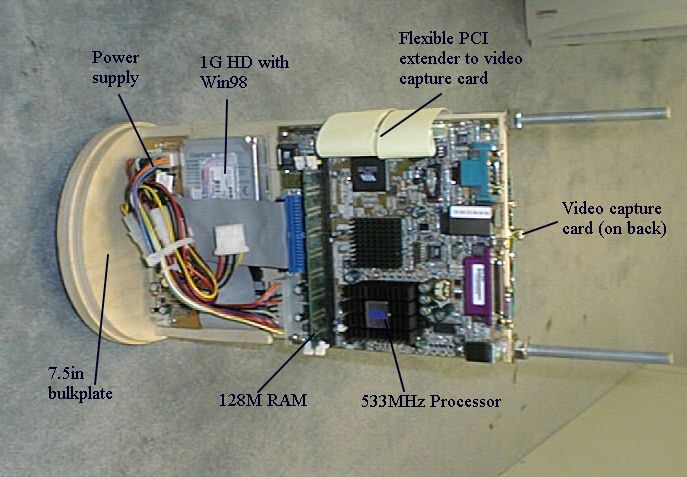
The computer is build around a microATX motherboard that has a Pentium class VIA microprocessor running at 533MHz.
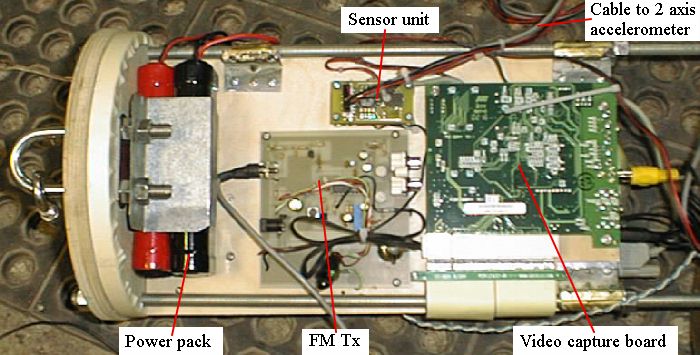
It has a 1G laptop hard drive, 128M flash drive, flexible PCI extender, PCI video capture board, FM transmitter hooked to sound output from mother board, ATX power supply connected to two 7.2V RC car battery packs, and a custom built sensor package.
The hard drive stores the operating system, Windows 98, and control program. Upon boot the control program is launched. The hard drive powers down after 3min.
The sensor package has 3 acceleration sensors and a pressure sensor. This data is passed to the computer for logging through the serial port. The sensor controller is a Roctronics board with custom firmware. The sensor package is also interfaced to a receiver that allows me to tell the system to start recording video shortly before launch.
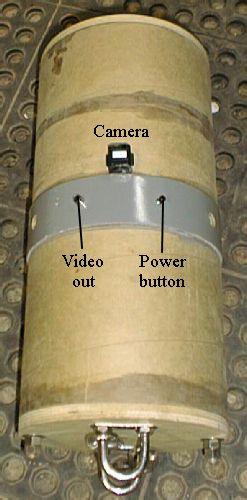
The video capture board has a pinhole spy camera connected to it. This camera is mounted in the airframe so that it looks down durring boost.
There is an external connector where I can connect a 5.5in LCD display if interface is needed.
The FM transmitter is connected to the audio output of the mother board. I
installed a speech SDK to allow the computer to announce flight events as they
occure. The spectators only need to tune their radios to the rocket to listen
in.
The events that will be announced are:
The custom software will record 4min of video to the flash drive along with 4min of sensor readings. This all starts when I trigger it through the radio control system. After the 4min it will switch to storing data to the hard drive.
Front and back views
I was concerned about the motherboard being able to handle the G forces so I made a foam insert using expanding foam to hold the components in place. So far I have had no issues with over heating.
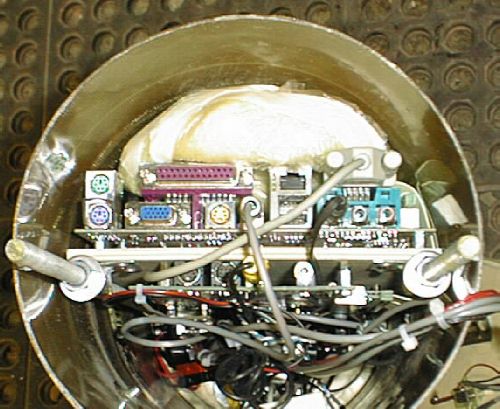

The foam insert. Installed and by itself.
I mounted the dual accelerometer module in the center of the bulk plate so it would be in the center of rotation. I used two shielded cables to deliver the signals to the sensor board where they get digitized.
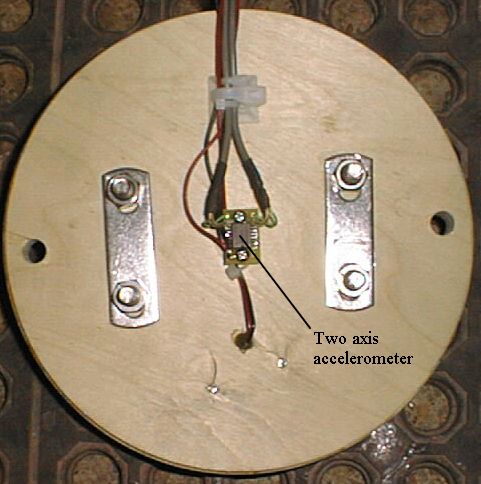
Accelerometer on bulkplate
Here are two shots of the assembled bay. They give a good view of the camera.