Introdução aos motores em estudo!
Segue abaixo uma pequena apresentação aos motores estudados nesse trabalho:
1. Motor ultra-sônico com cerâmicas à 90°
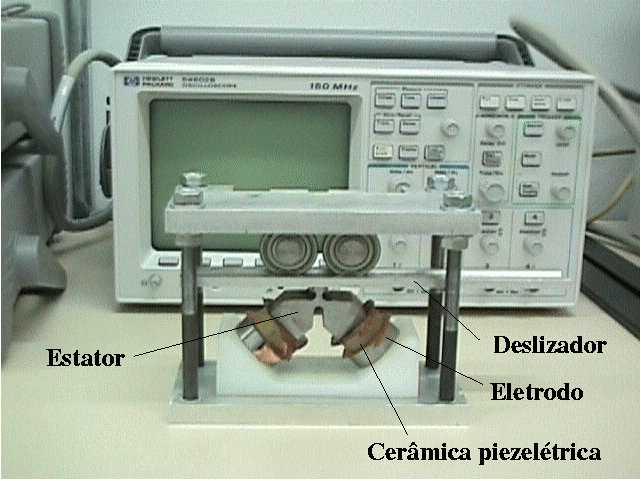
Esse motor composto basicamente de duas cerâmicas piezelétricas dispostas à 90 graus, com eletrodos para excitá-las, um estator de alumínio ligado às cerâmicas e um deslizador, que se move horizontalmente por atrito. Esse motor trabalha a freqüências ultra-sônicas, visto que sua freqüência de excitação é em torno de 42kHz.
Motor original
Basicamente a ativação do motor ocorre ao excitar as cerâmicas piezelétricas através da aplicação de tensão elétrica alternada nos eletrodos que estão em contato com as mesmas. Essas tensões devem estar defasadas para que a composição do deslocamento das cerâmicas gere uma elipse na ponta do estator, nesse caso a defasagem deve ser de 90 graus, ou seja, uma cerâmica é excitada com uma tensão em forma de seno e a outra com uma forma de cosseno. Dessa forma, as cerâmicas se deformam, gerando a deformação da estrutura através da composição das deformações, como pode ser visto na figura abaixo. Assim, através do atrito de contato entre o estator e o deslizador e devido ao perfil elíptico de deslocamento da ponta do estator consegue-se o deslocamento orientado horizontal do deslizador. Como já comentado, que não fazia parte da proposta inicial modelar a transferência de movimento por atrito considerando o contato entre “rotor” e estator, pois está acima do escopo de um trabalho de iniciação científica.
Movimentação do motor.
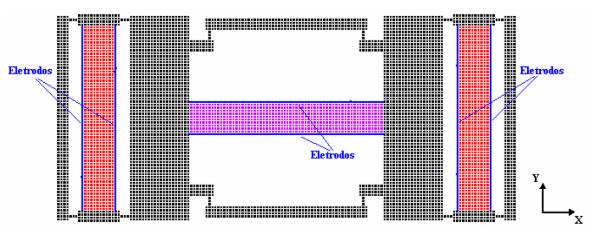
A figura abaixo mostra a modelagem desse motor em MEF. Nesse modelo foram usados os elementos PLANE42 e PLANE13 do ANSYS.
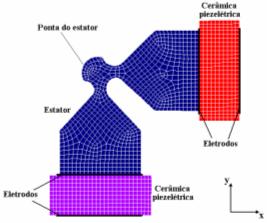
Modelo de MEF do motor.
2. Motor minhoca (inchworm)
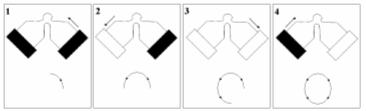
Motores “Inchworm”, ou motores “minhoca”, se caracterizam essencialmente pelo seu movimento retilíneo dentro de uma tubulação (como mostra a figura abaixo). Isso é obtido através da deformação da estrutura metálica devido à expansão e contração de suas cerâmicas piezelétricas Essas, por sua vez, podem ser distinguidas por sua função no movimento: cerâmicas de fixação e cerâmicas de expansão.

Esquema do movimento do motor “minhoca”.
Assim, através de um movimento intermitente de fixação nas paredes da tubulação e de expansão no sentido perpendicular à fixação, o motor realiza seu movimento retilíneo (ver figura abaixo).
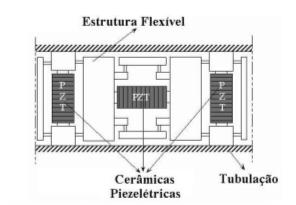
Motor “minhoca” padrão.
Desse modo, cada cerâmica (de fixação ou de expansão) deve ser excitada com tensões elétricas defasadas para criar esse movimento. Vale também mencionar que esse tipo de movimento é quasi-estático, operando, portanto, a freqüências inferiores a sua primeira freqüência de ressonância. Portanto, é preciso aplicar sinais defasados de tensão elétrica em cada cerâmica para que elas componham o movimento retilíneo do motor de acordo com a figura do movimento desse motor (em se tratando de um motor “minhoca” com três cerâmicas).
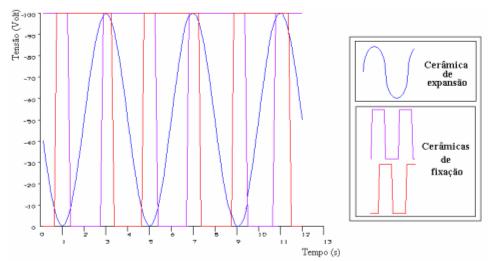
Ondas de tensão elétrica aplicada às cerâmicas de um motor “minhoca”.
A figura abaixo mostra a modelagem desse motor em MEF. Nesse modelo também foram usados os elementos PLANE42 e PLANE13 do ANSYS.
Modelo de MEF do motor.
3. Motor Langevin
Antes de prosseguirmos, devemos compreender melhor o funcionamento do motor Langevin, apresentado na figura abaixo. Nota-se que uma pilha de cerâmicas piezelétrica é o vibrador e a outra é o absorvedor. Caso houvesse somente uma pilha de cerâmicas como vibrador, a onda mecânica propagante refletiria no final da viga e voltaria criando interferências construtivas e destrutivas em seu próprio sinal, gerando uma onda estacionária. Assim, não seria possível mover o corpo móvel (ver figura abaixo), pois a onda seria estacionária. Portanto, colocam-se duas pilhas de cerâmicas piezelétricas, sendo uma delas um absorvedor da onda no final da viga, para que essa onda propagante seja eliminada, absorvida, antes de chegar ao final da viga evitando que a onda seja refletida, o que poderia criar interferência.
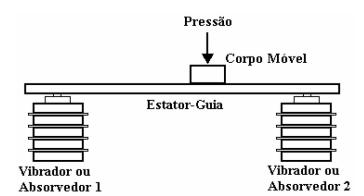
Motor Langevin.
Para entender esse funcionamento, analisa-se a equação abaixo.
Primeiramente, a velocidade (v) descrita nessa equação depende do material e do formato da peça que propaga a onda. Normalmente esses valores são medidos e tabelados de acordo com o material e a geometria do meio, ou seja, a velocidade no meio é um valor fixo para o motor. No entanto, a freqüência (f) e o comprimento de onda (λ) podem variar. Basicamente, ao se projetar um motor piezelétrico, se fixa uma freqüência de excitação e obtém-se, por cálculos, o valor esperado do comprimento de onda. Com esse valor, colocam-se as cerâmicas do absorvedor a uma distância do vibrador que seja múltipla do comprimento de onda.
Caso essa distância entre o vibrador e o absorvedor fosse fixa (o que acontece com o motor discutido nesse artigo), será preciso variar a freqüência da onda até se obter um valor de comprimento de onda que tenha essa distância entre as pilhas de cerâmicas como múltiplo. Enquanto esse comprimento de onda não é encontrado, teoricamente uma parte da onda não seria absorvida, refletiria e interferiria destrutivamente no próprio sinal, causando uma elipse de movimento menor e dificultando o deslocamento do corpo móvel. Ou seja, quando se varia a freqüência e se obtém a maior elipse de movimento possível, encontra-se o comprimento de onda que otimiza o sistema. Essa freqüência é chamada de “freqüência ótima de excitação”
Abaixo é apresentado um modelo de MEF do motor Langevin. Para modelar o motor Langevin mostrado abaixo, foi usado elemento de viga BEAM3 e o elemento PLANE13 (para as cerâmicas piezelétricas, que no caso apresentam 6mm de altura e 1mm de base). Para adicionar o amortecedor, utilizou-se o elemento COMBIN40 com coeficiente de amortecimento igual a 1, obtendo-se o seguinte modelo de elementos finitos.
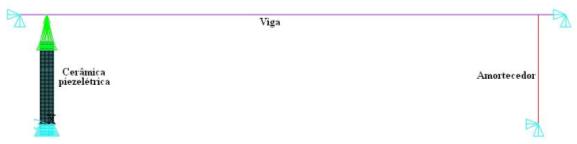
Modelo de elementos finitos do motor Langevin.