Table Tennis Trainer
The TTT robot is very easy to build and
also one of the fewest robots that are actually useful, it can really serve as a
trainer.
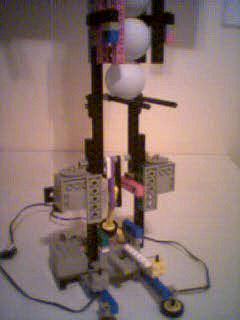
The TTT is made of 3 basic parts: the rotating base, the swinging
arm and the ball magazine. You will need a Turntable for the base so that the
robot can turn slightly from side to side.
I used one motor and connected it
to the turntable through a standard Lego part (see pictures).
The main
part of the TTT is the swinging arm that hits the ball. I used 2 motors for the
swinging arm to give it more power.
The ball magazine can hold up to 9 balls
at a time, you can make it higher to hold some more, but then I recommend that
you make the base wider (it can get pretty rough while at work).
The
program for this model is simple. The side-to-side action is random and two
touch sensors are used to control it (I used home made sensors, but Lego sensors
can do just fine). The swinging arm rotates for a brief moment, hits the ball,
stop with a break and than float to let it go down
again (with the help of gravitation).
Download the program for
this robot (3 KB).
Download the building
instructions (the following set of pictures) and a video
of the robot in action (319KB).
 |
 |
 |
 |
 |
 |
 |
 |
 |