Maze Robot
The maze robot solves a maze by the simple rule that says: Pick a line and follow it all the way to the other side. This rule, by the way, is only good for a certain type of mazes.
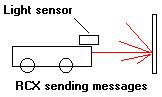
For this robot you will need one rotation sensor, one light sensor and one touch sensor. The light sensor coupled with the �Send Message� command serves as a �Proximity sensor�: the light sensor can sense the infrared light that the send message command put out when the robot is near a white obstacle as this diagram illustrate:
The proximity sensor instruct the robot to turn right
whenever its facing a wall.
The rotation sensor and the touch sensor make
sure the robot always travel near the wall.
Download the program for
this robot (3 KB).
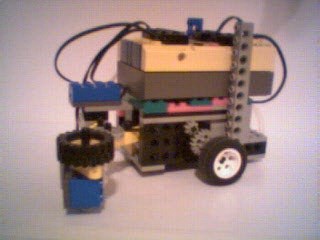
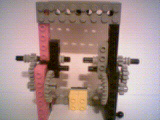
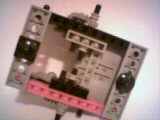
Download the building
instructions (the following set of pictures) and a video of the
robot in the maze (589 KB).
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |