Foundations of an alternative view of mechanics
1.1. on the absolute & the relative in theories of motion
The central question of inertia remains a mystery common to all generally coordinatised theories of motion. A brief background follows. As is well known, the simple Newtonian trajectory satisfying
![]() (1)
(1)
contains an ‘absolute’ acceleration of a particle relative to an embedding frame of Euclidean 3-space, and all relative motions can be resolved into component absolute motions of this kind. This is the acceleration in Newton’s Second Law, where
 (2)
(2)
in general only because the acceleration is absolute. If a is defined as a relative acceleration then a more complicated force law supervenes involving other accelerations, due to ‘fictitious’ forces such as the centrifugal force, and the resultant generally is not in the direction of the ‘real’ force. In this respect, then, an absolute reference frame is an essential tool of the theory and works perfectly well (if one neglects an implicit violation of the Third Law by a non-reactive absolute space) to define absolute inertial mass.
But an inference from the fact that there is one class of frames - inertial frames - which does satisfy Newton’s laws for relative motions leads on from a restricted principle of Galilean relativity to a more radical theory of relativity (SR) in which the embedding 3-space is rejected in favour of an embedding semi-Euclidean spacetime. SR makes the inertial mass vary with the total relativistic energy; but there is still an invariant lower bound to the energy in every rest frame. Absolute rest and absolute velocity are removed; but there is still an absolute acceleration and absolute rotation relative to a privileged class of inertial trajectories.
GR then proposes to remove all absolute motion by its principle of general covariance, and to replace local inertial frames (except over infinitesimal domains) by implementing Mach’s principle in the field equations. But Mach’s principle in its usual form assumes Newtonian instantaneous far-actions between the ‘fixed stars’ and a local particle. GR excludes far actions, however. An inertial particle now follows a timelike geodesic on a differentiable non-flat affine manifold instead of a straight line in Newtonian absolute space; but these geodesics pick out inertial trajectories against the background of a definite spacetime metric with a great deal of structure, and they define by exclusion a class of absolute motions. The boundary condition at infinity reproduces the function of Newtonian absolute space unless the field equations are modified to yield closed solutions, in which case they also yield solutions with structure in the absence of mass.
GR is a better ‘theory of gravity’ than Newton’s, and relates the general coordinates to the distribution of mass-energy; but it doesn’t tie the local coordinates to the global distribution of mass energy so as to successfully reclassify all rotations and accelerations as relative. It isn’t necessary in this theory that all inertial geodesics are occupied states, or are states directly anchored to mass particles, so that spacetime does not, as Einstein had hoped, reduce to a conventional system of reference for registering coincidences of material points. The theory contains empty spacetime solutions for gravitational waves independent of the presence of observables. Thus it still contains absolute motion, and it doesn’t explain it.
One very unconventional response to this problem is to accept it as part of the solution, allowing some property which has a kinematic transform as ‘absolute motion’ to enter as a primitive attribute of the elementary ‘objects’ in the theory, making an internal degree of freedom prior to any conception of generalised coordinates. This has been shown to be a legitimate relationist position (Note 1) and will emerge as a natural response in the trajectory-centred approach explored here.
Note 1: cf. Sklar, L., Inertia, Gravitation & Metaphysics, Phil. Sci. 43 (1976), 1-23; Friedman, M., Foundations of Spacetime Theories, Princeton U. Press, 1983. This point of view is also related to the non-differentiable scale element in a development of GR such as Laurent Nottale's scale-relativity formalism.
The distinction between a Newtonian vis insita and this primitive attribute is that the former is a quantity attached to a point object reacting against an absolute space, whereas the latter must incorporate the functions both of ‘space’ and of ‘mass’ in the form of a dynamical equilibrium internal to each elementary object, so that the scalar mass and coordinate-space functions of a system of ‘particle trajectories’ are jointly replaced by transformations of a system of primitive unit vectors. To realise Mach’s principle as a lower bound on these transformations we require this underlying unit vector to represent a connection between measurements which is based neither on finite-speed relativistic ‘field contact’ forces nor on infinite-speed Newtonian ‘far action’ forces. This is just the type of connection - a ‘nonlocal correlation’ - which occurs when SR and quantum theory are brought together. This leads to the idea of a system of anisotropic dynamical objects replacing the manifold of ‘free’ affine trajectories, embodying space structure through scale-free neo-Machian ‘nonlocal contact forces’.
In developing this idea the objective will be to avoid the introduction of empty states in the first instance by eliminating the notion of volume from the toolkit of basic principles. The conception of the classical central field is of a spherically symmetric infinite volume swept out by an infinite series of concentric smooth wavefronts, each defined by an infinite number of point states, any number of which may remain empty states to a radius of infinity. There is almost nothing intelligible about such a structure. Some modern semi-classical and quantum theories of electrodynamics have attempted to regain intelligibility by eliminating the degrees of freedom of the field. We propose, by substituting a radically discontinuous kinematic and dynamical space in place of the central field, to eliminate extraneous degrees of freedom of the spatial volume in an analogous way but at a more primitive level of the ontology.
In terms of gravitation, eliminating the empty states of the continuous central field means losing the traditional conception of space altogether (although this doesn’t have to mean losing its functionality as a model, of course) and in its absence the meaning of ‘absolute’ and ‘relative’ states will change dramatically. It is not even clear that there remains any kind of meaningful distinction. But this could be construed as extending the powerful notion of complementarity to the traditional distinction between ‘object’ and ‘space’ (Einstein's ‘straw’ and ‘marble’), a development of supersymmetry naturally congenial to the spirit of quantum theory and one echoing the direction of development that leads from Kaluza-Klein supergravity theories to string theories. However unlike 'conventional' string theories we wish our new structure to be radically background-independent and altogether free of scale.
The approach advocated here has been called parcellular mechanics (PM). Some basic features of this programme are sketched in Fig.1. We will attempt to show that a neo-Machian implementation of inertia might be recovered from a quantum theory in which mass-energy is an emergent property of a structure of intrinsically mass-free and intrinsically scale-free primitive objects which can be thought of, in terms of quantum statistics, as gravitational anyons in a 2-dimensional state space.
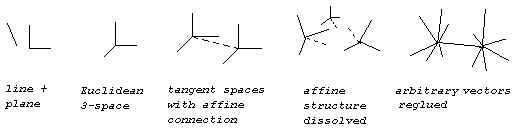
Fig.1. Schematically evolving the PM state space from 'block' 3-geometry.
The sketch on the right shows two nodes in a graph of complex vectors with self-orthogonal components. They are projections of lightlike zero vectors in a hyper-complex space CN. These linear vectorial objects are the primary objects, not their nodes; they are supersymmetric and each properly preserves time-reversal invariance on a unit scale in CN. There are only filled states and no empty states, each of N objects being isomorphic to one of N linear 'volume elements' of a state space of arbitrary dimension N forming an exhaustively connected network, i.e. a complete finite graph. It is also a simple graph without loops or multiple edges. The Lorentzian local space R4 describes a projective evolution of R3 surfaces inside CN due to a spontaneous supersymmetry-breaking. We recover the Euclidean plane triangle as the minimal structural element of a hyper-complex space CN which behaves as a 2-space, in the sense of the reduced dimensionality of a critical-point system with a correlation length always equal to the scale on any 3rd dimension.
go to Section 1.2 Scope
and motivation of the present work
Foundations
index