University of Salamanca
P-NAV: Navigation system for a mobile robot
Department of Computer and Automatic science
|
University of Salamanca |
P-NAV: Navigation system for a mobile robot |
Department of Computer and Automatic science |
P-NAV is a navigation system for mobile robots based on the use of potential fields. It is built on the base of the system Saphira of Kurt Konolige in their version 6.2. It also contains support applications to translate maps in format of Saphira in matrixes of obstacles and distances which are necessary for the calculation of potentials, as well as of a generating tool of the navigation letter.
The idea taken for the realization of this navigation system is to try to the obstacles and the robot like loads of the same sign and to the destination point like a load of contrary sign. The operation is based on the application of the masks of Sobel on the matrixes obtained starting from the translation of the maps of Saphira obtaining this way some values of potential gradients in the x and y axes. This way the Force vector is obtained, and it will act on the robot and direct it in real time toward its destination point avoiding a collision with the obstacles.
The system also has a defaulted behavior that it takes data of the robot's sonars to avoid obstacles that can arise at the moment and and to be able to leave that the step.
The developed navigation system is divided in three tools: one that takes load of translating the maps with format of Saphira in a binary matrix of obstacles and of calculating the distances from each point to the nearest obstacle, a second whose mission is to generate a navigation letter that will be used to define a navigation area and a third, and the most important, in charge of endowing of the behavior proposed to the robot and of the handling of navigation letters designed for this project.
This is the aspect that the user will find for each application:
Tool of generation of maps of obstacles and distances:
Figure 1
This tool has as mission to read the files .MAP of Saphira and to generate starting from them maps designed for the use of the navigation system that they indicate where obstacles and the distance exist (or repellent potential if we keep in mind that the obstacles take like loads of the same sign that the one that the robot possesses) that there are until them.
Generating tool of the navigation letter:
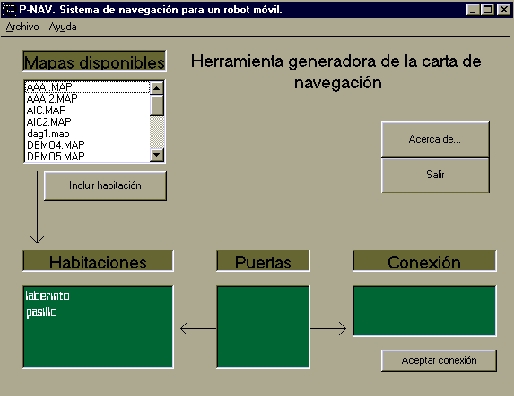
Figure 2
In this navigation system a navigation letter is used whose format consists in a list of doors and another of rooms and how they are connected among them. It consists on a text file that can be edited by hand or you can use this application of easy handling to carry out this task.
Navigation system integrated in the Saphira system:
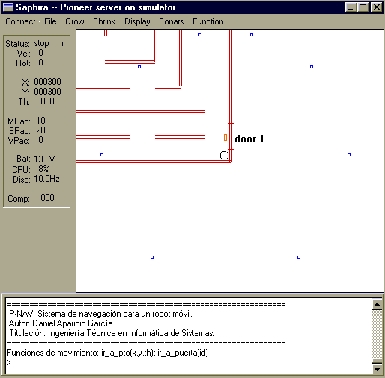
Figure 3
The navigation system is integrated in the
Saphira v6.2 system. It is the nucleus of the development of this project.
By means of this application the robot's automatic navigation is controlled
using the potential gradients as base to avoid obstacles and to go to a
point, besides keeping in mind the values received by the sonars that it
takes included the robot.