 O yılın zorunlu derslerinden biri olan "Proje" dersini aldığımda, daha önce step motorlar
konusunda tecrübeli olduğumdan step motorlu, iki segmentli bir robot kolu yapmayı proje konusu
olarak seçtim. Nakış makinaları konusunda daha önce çalıştığımdan XY lineer sistemler ve bu
sistemlerin programlanması konusunda bilgim vardı. İki segmentli robotlarda hareketin hangi
geometrik temellere dayandığını öğrenmek için bu türden bir örnek yapmak istedim. Bu çalışma
daha çok uygulamalı geometri olarak düşünülebilir. Konunun temelini 3. bölümdeki
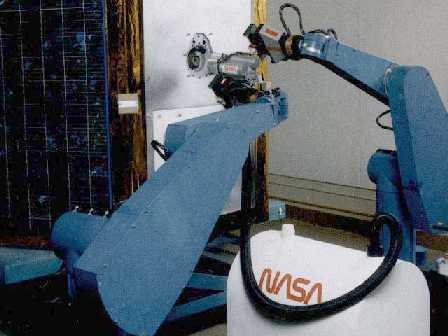
Dönüşüm Formülleri oluşturmaktadır. Bu robotu yapıp çalıştırdıktan sonra
fotoğraflarını çekmedim. Neye benzediği konusunda fikir vermesi için internetten çektiğim
bu fotoğrafları kullandım. Yan fotoğraftaki robotta step motor değil servo kontrollü
DC motor kullanılmıştır. Elektrik makinası kullanılan bir robotta kullanılması gereken
motor türünün step motor olmaması gerektiğini ne yazık ki projeyi bitirdikten sonra farkettim.
Segmentler direk motor miline bağlı olduğunda step motorların torkları düşük olduğuğundan verim
düşük oluyor. Ayrıca step motorların hareket çözünürlüğü (200 adım/devir) bu türden sistemler
için elverişli değil. Motor miline bağlı olan 20cm uzunluğunda bir segmentin uç kısmı,
motor bir adım attığında (20 x 2 x 3.14)/200 = 0.628cm hareket ediyor. Bu hareketin kesik kesik
olmasına sebep olduğu gibi atalet yüzünden motorlarda kaymalar olabiliyor. Redüktör kullanıldığı
durumda daha iyi sonuçlar alınabilir.
O yılın zorunlu derslerinden biri olan "Proje" dersini aldığımda, daha önce step motorlar
konusunda tecrübeli olduğumdan step motorlu, iki segmentli bir robot kolu yapmayı proje konusu
olarak seçtim. Nakış makinaları konusunda daha önce çalıştığımdan XY lineer sistemler ve bu
sistemlerin programlanması konusunda bilgim vardı. İki segmentli robotlarda hareketin hangi
geometrik temellere dayandığını öğrenmek için bu türden bir örnek yapmak istedim. Bu çalışma
daha çok uygulamalı geometri olarak düşünülebilir. Konunun temelini 3. bölümdeki
Dönüşüm Formülleri oluşturmaktadır. Bu robotu yapıp çalıştırdıktan sonra
fotoğraflarını çekmedim. Neye benzediği konusunda fikir vermesi için internetten çektiğim
bu fotoğrafları kullandım. Yan fotoğraftaki robotta step motor değil servo kontrollü
DC motor kullanılmıştır. Elektrik makinası kullanılan bir robotta kullanılması gereken
motor türünün step motor olmaması gerektiğini ne yazık ki projeyi bitirdikten sonra farkettim.
Segmentler direk motor miline bağlı olduğunda step motorların torkları düşük olduğuğundan verim
düşük oluyor. Ayrıca step motorların hareket çözünürlüğü (200 adım/devir) bu türden sistemler
için elverişli değil. Motor miline bağlı olan 20cm uzunluğunda bir segmentin uç kısmı,
motor bir adım attığında (20 x 2 x 3.14)/200 = 0.628cm hareket ediyor. Bu hareketin kesik kesik
olmasına sebep olduğu gibi atalet yüzünden motorlarda kaymalar olabiliyor. Redüktör kullanıldığı
durumda daha iyi sonuçlar alınabilir.
Proje ticari amaçlı olmadığı için kullanılan tüm donanım olabildiğince basit yapılmıştır. Sürücü devre olabilecek en basit step motor sürücüsüdür. Step motor sürücüye unipolar bağlanmıştır. Bu şekilde bağlantı yapıldığında motorun tam adım(full step) hareket etmesi için bobinlere uygulanması gerilim aşağıdaki sırayı takip etmelidir:
| A | /A | B | /B |
| V | V | 0 | 0 |
| 0 | V | V | 0 |
| 0 | 0 | V | V |
| V | 0 | 0 | V |
Bu tabloda V motoru beslemek içim kullanılan gerilime işaret etmektedir. Uygulamada besleme gerilimi 24 Volt DC olarak alınmıştır. Motorun dönüş yönünü değiştirmek için bu sıra tersinden uygulanmalıdır. Uygulamada 200 adım/devirlik bir step motor kullanılmıştır. Yarım adım(half step) çalışma seçildiğinde motorun her devri 400 adım olacaktır. Bu, giriş bölümünde bahsedilen 0.628cm'lik segment hareketini yarıya düşürmeyi, dolayısıyla kolun daha yumuşak hareket etmesini sağlar. Yarım adım çalışma için bobinlere uygulanması gereken gerilim aşağıdaki sırayı takip etmelidir. Dönüş yönü tam adım çalışmada olduğu gibi bu sıra tersine çevrilerek değiştirilebilir.
| A | /A | B | /B |
| V | V | 0 | 0 |
| 0 | V | 0 | 0 |
| 0 | V | V | 0 |
| 0 | 0 | V | 0 |
| 0 | 0 | V | V |
| 0 | 0 | 0 | V |
| V | 0 | 0 | V |
| V | 0 | 0 | 0 |
Şekil 3.1'de robotun kartezyen koordinatlardaki sembolik çizimi görülmektedir. Çizimdeki iki segmenti birer vektör olarak düşünürsek A vektörünün koordinatları
![]()
olacaktır. B vektörünü orijine taşırsak eksenlerle yaptığı açı ![]() kadar
olacaktır. Bu durumda B vektörünün koordinatları
kadar
olacaktır. Bu durumda B vektörünün koordinatları
![]()
olacaktır. A ve B vektörlerini vektörel olarak toplarsak robotun uç kısmının kartezyen koordinatlardaki yerini bulmuş oluruz
![]()
![]()
iki ifadenin karelerini alıp toplarsak
![]()
sonucunu buluruz. Bu sonucu bulurken
![]()
dönüşüm formülleri kullanılmalıdır. (II) denkleminden![]() 'yı
çekersek
'yı
çekersek
![]()
bulunur ve ![]() 'den
'den
![]()
hesaplanır. Son olarak
![]()
ifadesinden ![]() açısı hesaplanmış olur. Burada dikkat edilecek nokta (II)
denkleminin + ve - iki kökü olmasıdır. Bunun fiziksel anlamı robotun aynı
(x,y) noktasında iki değişik şekilde bulunabilmesidir. Şekil 3.2'de bu
durum grafik olarak gösterilmiştir.
açısı hesaplanmış olur. Burada dikkat edilecek nokta (II)
denkleminin + ve - iki kökü olmasıdır. Bunun fiziksel anlamı robotun aynı
(x,y) noktasında iki değişik şekilde bulunabilmesidir. Şekil 3.2'de bu
durum grafik olarak gösterilmiştir.
Şekil 3.2 Aynı noktada robotun iki farklı durumu.
![]() açısı
bulunduktan sonra (I) denklemini şu formda yazabiliriz:
açısı
bulunduktan sonra (I) denklemini şu formda yazabiliriz:
![]()
(III) denklem sisteminde
![]()
olarak alınmıştır.
değişken dönüşümleri yapılırsa (III) denklemi şu formda
![]()
ya da
![]()
şeklinde yazılabilir. Burdan ![]() açısı
açısı
![]()
yazılabilir. ![]() açısı buradan çekilince
açısı buradan çekilince
![]()
sonucu bulunur.
![]()
değişken dönüşümleri yapılarak son olarak
![]()
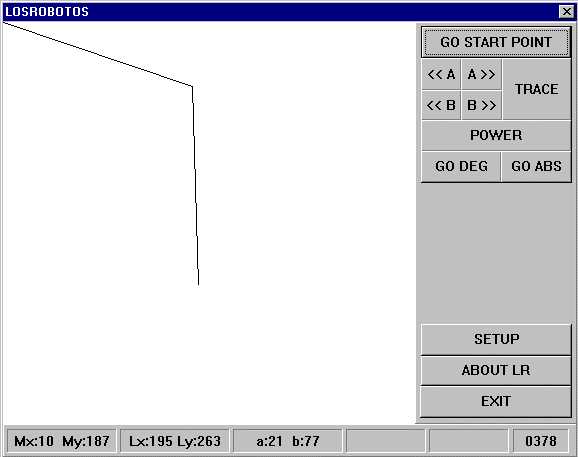
Kontrol programı Delphi 3.0 kullanılarak yazılmıştır. Kaynak kodlarını ve programın derlenmiş halini download etmek için buraya tıklayabilirsiniz. Programı çalıştırdıktan ekranın sağ tarafında fareyle gezindiğinizde el işareti çıkan yerlere tıklarsanız segmentler o noktaya konumlanacaktır. Farenin sol tuşunu basılı tutup gezdirdiğinizde bu hareketin kesintisiz devam ettiğini görebilirsiniz. Trace butonuna bastığınızda robotun uç kısmını gösteren nokta sanki kalem takılıymış gibi çizim yapmaya başlar. Setup bölümünden segment uzunlukları ve motor açıları girilebilir. Bu değerleri değiştirerek çizim yapmak için ideal değerlere ulaşabilirsiniz. A ve B motorun iki segmentine verilen isimlerdir. "A >>" ve "A <<" butonlarıyla iki segment birden hareket ederken "B >>" ve "B <<" butonlarıyla sadece uç segment hareket eder. "GO ABS" robota kartezyen koordinat girmenize ve onayladığınızda robotun o noktaya konumlanmasını sağlar.ve "GO DEG" aynı işlemi motor açıları kullanarak yapar. Power butonuna basıldığında ekrandaki hareketler PC printer porta bağlı olan robota iletilir. Ekranın alt kısmında bulunan değerler motor açılarını, uç kısmın kartezyen koordinatlarını göstermektedir.