
โมดิฟายด์ Futaba skysport4 หน้าขาว (T4YF) เป็น 5 แชนแนล พร้อมฟังก์ชั่น Idle Up และ Throttle Hold สำหรับเล่น เฮลิคอปเตอร์
ผมเล่น Walkera35 แบบ 4 แชนแนล โดยใช้ รีโมท Futaba Skysport4 หน้าดำมีเข็ม มานาน บินเดินทางได้คล่องดี nose in ได้นานเท่าที่ต้องการ ตอนนี้เลยชักอยากจะลองเล่น 3D เล็ก ๆ บ้าง เคยลองเหมือนกันครับ บิน Loop ตีลังกา โดย shoot ขึ้นไปสูงสูงก่อน แล้วเดินหน้าเร่งความเร็ว ดึง up ให้หงายหลังลงมา ผ่อนคันเร่งเล็กน้อย พอตีลังกากลับมาได้ก็เร่งความเร็วลอยตัวขึ้น ต้องลุ้นพอสมควรเพราะช่วงที่ตีลังกาหงายหลังนั้นจะสูญเสียความสูงอย่างรวดเร็วมาก เนื่องจากไม่มี pitch ลบช่วยยกตัวเวลาหงายท้อง ฝึกตีลังกาอยู่สองสามครั้ง มีครั้งหนึ่งยกตัวขึ้นไม่ทันทำให้พุ่งลงจูบพื้นโรเตอร์เฮดกระจาย ก็เลยคิดว่าคงต้องปรับปรุงรีโมทให้บังคับแบบ 3D ได้โดยแยกเซอร์โวยกพิทช์และคันเร่งออกจากกัน
ตอนแรกผมคิดจะกลับไปใช้รีโมทรีซีฟของ walkera35 เดิมที่ถอดเก็บเอาไว้ แต่พอเอามาลองใช้ดูรู้สึกว่าไม่ละเอียดเหมือนรีโมท futaba เลยครับ การบังคับมันรู้สึกก๊อก ๆ แก๊ก ๆ ยังไงพิกล คงใช้รีโมท Futaba มาจนเคยชินกับความละเอียดแน่นอนของมันแล้ว ก็เลยว่าจะใช้รีโมทมาตรฐานดีกว่า แต่พอดูราคาค่างวดของรีโมท Futaba 6exh แล้ว โอ้ โห แพงจัง ขนาดของมือสอง ราคาตั้ง 3,500 บาท ก็เลยเปลี่ยนใจ คิดว่ามาดัดแปลงเพิ่มช่องของรีโมท Futaba skysport4 ที่มีอยู่ดีกว่า
แนวคิดของผมที่จะดัดแปลงมีดังนี้ครับ
ในการบังคับเฮลิคอปเตอร์บินเดินทางหรือลอยตัวตามปกติ จะใช้แค่ 4 แชนแนล โดยคันเร่งจะใช้ร่วมกับเซอร์โวยก pitch คือเมื่อเร่งเครื่องเซอร์โวยก pitch ก็จะยกขึ้นด้วยพร้อม ๆ กัน เวลาเบาเครื่อง เซอร์โวยก pitch ก็จะลดลงด้วย แต่หากต้องการเล่น 3D ตีลังกาหงายท้อง จะต้องแยกการควบคุมคันเร่ง และเซอร์โวยก pitch ออกจากกันโดยอิสระ ถ้าเป็นรีโมทของ walkera ก็คือการโยกสวิตช์ตัวบนขวาจาก N เป็น 1 ทำให้คันเร่งค้างที่รอบสูงสุดเกือบตลอดเวลา (มีเบาลงบ้างในช่วงกลางของสติ๊ก) ส่วนสติ๊กของรีโมทด้านซ้ายก็จะใช้ควบคุมเซอร์โวยก pitch เพียงอย่างเดียวโดยไม่เกี่ยวกับคันเร่งอีกต่อไป เพื่อว่าเวลาบินตีลังกาหงายท้อง จะได้ปรับ pitch ให้เป็นลบเพื่อให้เครื่องลอยตัวขึ้นในขณะที่กำลังหงายท้องอยู่ได้ โดยไม่ตกลงมา ดังนั้น อย่างน้อยรีโมทที่ใช้ควบคุมต้องมี 5 แชนแนล แยกอิสระดังนี้
แชนแนล 1 ควบคุม aileron สติ๊กด้านขวา
แชนแนล 2 ควบคุม elevator สติ๊กด้านขวา
แชนแนล 3 ควบคุม pitch สติ๊กด้านซ้าย
แชนแนล 4 ควบคุม rudder สติ๊กด้านซ้าย
แชนแนล 5 ควบคุม throttle คือคันเร่ง
การควบคุมแชนแนล 5 จะใช้แบบ สวิตช์โยกเปิดมอเตอร์ให้เป็นคันเร่งสูงสุด แบบที่รีโมท walkera ทำอยู่ก็ได้ เวลาลงจอดค่อยปิดสวิตช์คือดับมอเตอร์ไปเลย หรือจะให้เนียนขึ้นไปอีก สำหรับแชนแนล 5 ก็ควรจะใช้แบบโวลลุมหมุนปรับเร่งเครื่องเบาเครื่องได้ตามต้องการ
รีโมท Futaba skysport4 ปกติจะบังคับได้ 4 แชนแนล แต่สามารถดัดแปลงเพิ่มเป็น 5 แชนแนลได้ไม่ยาก สำหรับรุ่น skysport4 หน้าดำมีเข็มที่ผมใช้อยู่ หากเพิ่มเป็น 5 แชนแนล จะได้แชนแนลที่ 5 เป็นแบบสวิตช์ on-off คือแค่เปิดกับปิด ปกติจะใช้ต่อกับเซอร์โวพับล้อ แต่ที่ผมต้องการนั้น แชนแนล 5 ที่เพิ่มขึ้นจะต้องบังคับแบบ proportional คือปรับได้ละเอียดโดยใช้โวลลุ่ม เพื่อจะเอาไว้ควบคุมการเร่งเครื่องเบาเครื่องได้ เนื่องจากผมใช้มอเตอร์ brushless หากใช้สวิตช์ปิดเปิดให้มอเตอร์หมุนด้วยคันเร่งสูงสุดทันที อาจทำให้เฟืองถูกกระชากรูดเสียหายได้
ผมก็เลยเล็งไปที่รีโมท Futaba Skysport4 รุ่นหน้าขาวครับ เพราะรีโมทรุ่นนี้สามารถดัดแปลงเพิ่มช่องที่ 5 ได้แบบ proportional และเนื่องจากรีโมทรุ่นนี้ไม่เป็นที่นิยมทั้ง ๆ ที่เป็นรุ่นใหม่กว่า เพราะคนนิยมเล่นหน้าดำมากกว่า ทำให้ราคารีโมทมือสองอยู่ในช่วง 650-1,000 บาท ส่วนราคามือหนึ่งอยู่ในช่วง 1,000-1,500 บาท เท่านั้น ถูกพอ ๆ กับรีโมทของ walkera เลยครับ ก็เลยสั่งซื้อทางอินเตอร์เนตได้มาหนึ่งตัว
ลงมือดัดแปลงรีโมทกันเลยครับ
รีโมท futaba Skysport4 หน้าขาว ใช้ micro controller ของ Futaba เบอร์ P6347 ร่วมกับ 8-1 multiplex เบอร์ 4051 รับสัญญาณจำนวน 5 แชนแนล จากตัวต้านทานปรับค่าได้หรือโวลลุมขนาด 5K โดยแชนแนลที่ 1-4 ใช้โวลลุม 4 ตัวที่ติดกับสติ๊กทั้งสองด้าน ส่วนแชนแนลที่ 5 ของเดิมนั้นจะต่อผ่านตัวต้านทานขนาด 4.7k จำนวน 2 ตัวแทนโวลลุม

การดัดแปลงเพิ่มแชนแนลก็ไม่ยากครับ คือถอดตัวต้านทานขนาด 4.7k ทั้งสองตัวออก แล้วใส่โวลลุมขนาด 5K ลงไปแทน แต่ผมใช้วิธีตัดลายวงจรจากขาไอซี 4051ที่ไปยังตัวต้านทาน 4.7k ออก แล้วต่อสายกลางจากโวลลุมเข้าไปที่ขาไอซี 4051 โดยตรง ส่วนขาโวลลุมทางซ้ายและขวา ก็ต่อเข้าจุด ST5 บนแผงวงจรตรงจุดของไฟบวกและกราวนด์
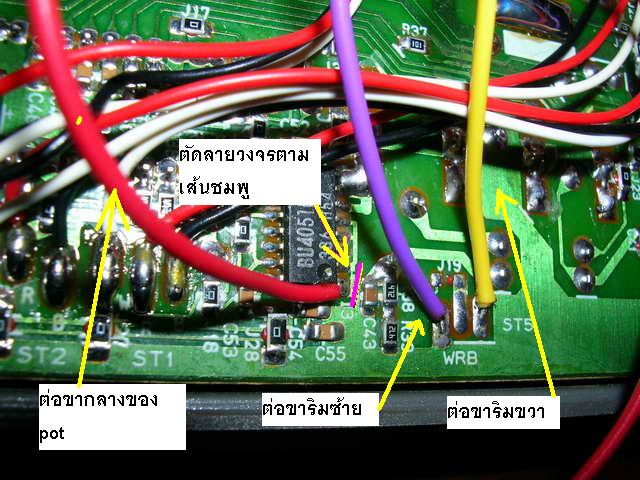
จากนั้นก็ติดตั้งโวลลุมเข้าที่มุมบนขวาของรีโมทก็เป็นอันเสร็จเรียบร้อยครับ

ขอให้สนุกครับ
[email protected]10 พฤศจิกายน 2549
เพิ่มสวิตช์ Normal และ 3D
การเพิ่มโวลลุม ที่ ch5 เพื่อบังคับคันเร่ง ทำให้สามารถแยกช่องควบคุมได้อย่างอิสระเพื่อบินแบบ 3D และเพื่อความสะดวกยิ่งขึ้น ผมจึงทำสวิตช์ Throttle+Pitch Mix เพื่อผสมสัญญาณคันเร่งกับเซอร์โวยก pitch เข้าด้วยกันในกรณีที่ต้องการบินแบบปกติ สำหรับบินลอยตัวหรือบินเดินทางสบาย ๆ สวิตช์นี้จะมีการทำงานคล้าย ๆ สวิตช์ N,1 ของรีโมท Walkera35 ครับ คือหากโยกสวิตช์ไปที่ N หรือ Normal การโยกสติ๊กด้านซ้ายขึ้นลงจะเป็นการควบคุมทั้งคันเร่งและเซอร์โวยก pitch พร้อม ๆ กัน แต่หากโยกสวิตช์ไปที่ 3D จะเป็นการแยกการควบคุมคันเร่งและ pitch อย่างอิสระ
ผมใช้หลักการผสมสัญญาณง่าย ๆ ครับ คือเมื่อต้องการจะ mix ระหว่างคันเร่งกับ pitch ก็ใช้สวิตช์เลือกแบบสองทาง ตัดการควบคุมโวลลุม ของ ch5 ออกเลย แล้วเชื่อมแชนแนล 5 กับ แชนแนล 3 เข้าด้วยกันเพื่อให้ POT ของ แชนแนล 3 เป็นตัวควบคุมทั้งแชนแนล 5 ด้วย ลองดูแผนผังการต่อวงจรครับ
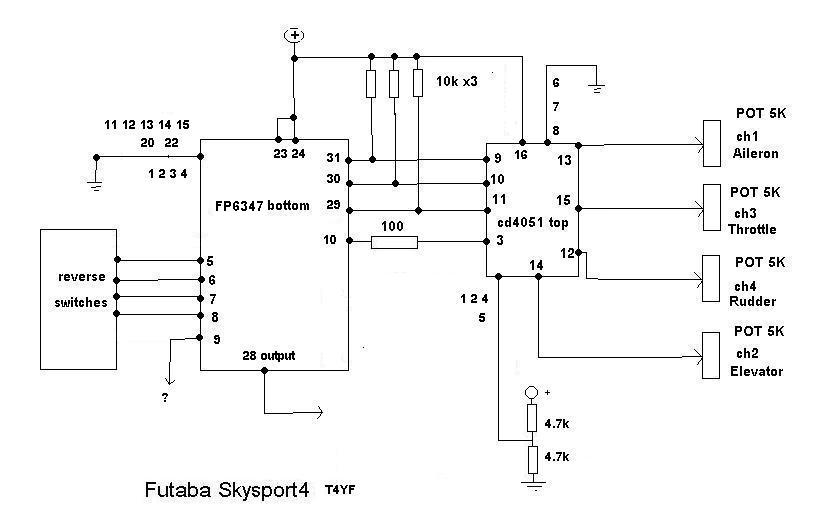
ภาพนี้เป็นภาพแผนผังของ Futaba หน้าขาวก่อนการดัดแปลง จะเห็นว่าที่ขา 1,2,4,5 ของ cd4051 ซึ่งเป็นช่องของ ch5 ต่อกับตัวต้านทางแบ่งแรงดันอยู่
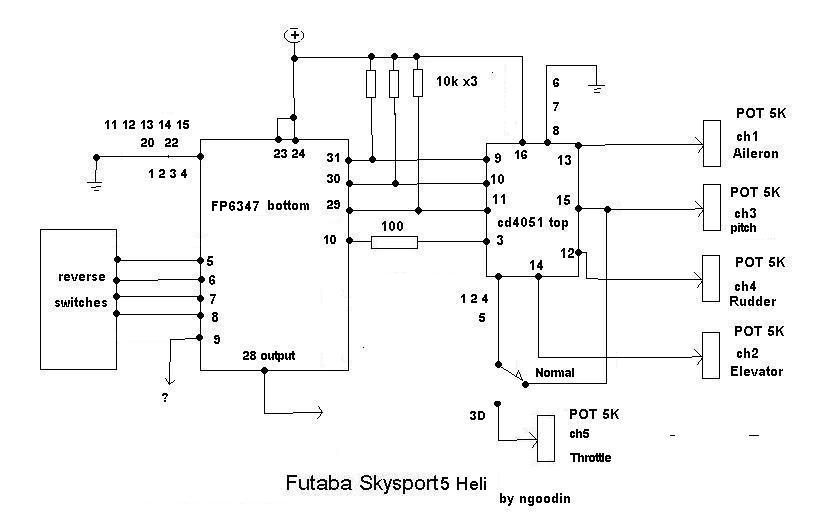
ส่วนภาพนี้เป็นแผนผังการต่อวงจรเมื่อเราดัดแปลงเพิ่ม ch5 และสวิตช์ Throttle-Pitch Mix แล้วครับ
ภาพการติดตั้งโยงสายเพิ่มสวิตช์

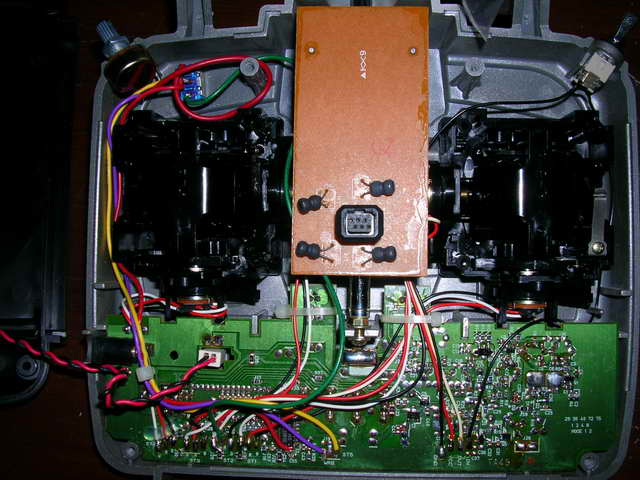
ภาพการติดตั้งโวลลุม และสวิตช์ด้านหน้าครับ การโยกสวิตช์ขึ้นจะเป็น Normal การควบคุมคันเร่งและ pitch จะรวมกันอยู่ที่สติ๊กด้านซ้าย แต่ถ้าโยกสวิตช์ลงจะเป็น 3D ควบคุมคันเร่งด้วยโวลลุม และควบคุม pitch ด้วยสติ๊กด้านซ้าย แยกการควบคุมอิสระสำหรับบินตีลังกาหงายท้องครับ
ผมก็เลยตั้งชื่อเจ้ารีโมทหน้าขาวที่ดัดแปลงสำหรับเล่น ฮ นี้ว่ารุ่น Skysport5-Heli ครับ เท่ไหม
จากการทดสอบการทำงานของรีโมท Skysport5-Heli โดยทดลองกับรีซีฟ e-sky สามารถใช้การได้ดีตามที่ออกแบบไว้ครับ ผมนำไปติดตั้งใน Walkera35 บินได้ดีทั้ง Mode Normal และ 3D
สำหรับ Mode Normal ก็ใช้สติ๊ก ch3 ควบคุมการเร่งเครื่องเบาเครื่องและ pitch ตามปกติ
สำหรับ Mode 3D เวลาเริ่มเล่นผมจะหมุนโวลลุม ch5 เร่งมอเตอร์ใบพัดให้ได้รอบประมาณ 80-100 เปอร์เซ็นต์ก่อน จากนั้นจึงค่อย ๆ โยกสติ๊ก ch3 ยก pitch จนเครื่องลอยตัวบินไปได้ครับ และบินด้วยคันเร่งคงที่ตลอด เวลาจะร่อนลงก็ค่อย ๆ ลด pitch จนเครื่องแตะพื้นแล้วค่อยลดโวลลุม ch5 เพื่อดับเครื่องครับ
ส่วนปุ่ม trim ของ สติ๊ก ch3 ใน Mode 3D จะทำหน้าที่เหมือนปุ่ม PZT ในรีโมท walkera35 คือใช้ปรับค่าเริ่มต้นในการตั้งแขนเซอร์โวยก pitch ว่าจะให้ pitch เปิดเร็วหรือช้า

จุดที่รีโมท Skysport5 Heli ยังทำไม่ได้คือการตั้ง pitch curve และ Throttle curve และวงจร Revo Mix และผมกำลังหาวิธีเพิ่มปุ่ม PLT สำหรับกำหนดช่วงเหวี่ยงของเซอร์โวยก pitch ว่าจะให้ pitch เปิดมากหรือน้อย ปุ่มนี้มีหลักการเดียวกับสวิตช์ dual rate ของรีโมทเครื่องบินนั่นเอง ซึ่งจะทำให้สะดวกในการเล่น 3D มากขึ้น
แต่ที่สำคัญที่สุดคือการพัฒนาฝีมือการบิน 3D ของผมเองเท่านั้น สงสัยต้องซื้ออะไหล่ ฮ Walkera35 เตรียมไว้เยอะ ๆ หน่อยแล้ว คงได้ตกอีกหลายครั้ง
ขอให้สนุกครับ
[email protected]14 พฤศจิกายน 2549
เพิ่มสวิตช์ tailmotor on/off สำหรับตัดการทำงานของมอเตอร์หาง
Walkera 35 ของผมดัดแปลงใช้มอเตอร์หางฟอลคอน ทนทานมาก บินได้มากกว่า 200 ไฟลต์แล้ว แต่ที่ยังมีความไม่สะดวกอยู่บ้างก็ตอนที่ลงจอดดับมอเตอร์ใบพัดหลักแล้ว แต่มอเตอร์หางยังคงทำงานอยู่ ซึ่งเป็นลักษณะปกติของ ฮ ที่ดัดแปลงใช้มอเตอร์หาง สำหรับรีโมทมาตรฐานที่มีฟังก์ชั่น Revo mix สามารถจัดปรับตั้งให้มอเตอร์หางดับตอนลงจอดได้ แต่ Futaba Skysport5-heli ของผมยังไม่มีฟังก์ชั่นนี้ครับ ผมจึงหาวิธีการดับมอเตอร์หางแบบง่าย ๆ ด้วยการเพิ่มสวิตช์ on/off สำหรับมอเตอร์หางโดยเฉพาะ

หลักการทำงานก็มีง่าย ๆ ครับ คือการเพิ่มสวิตช์เพื่อลัดวงจรระหว่างขั้วกลางของ POT ที่ใช้กับ ch4 ลงกราวด์ จะมีผลตัดการทำงานของ ch4 ทำให้ไม่มีสัญญาณไปที่ไจโรและมอเตอร์หางครับ
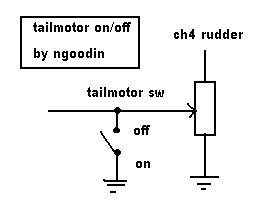
สวิตช์ตัวนี้นอกจากจะใช้ดับมอเตอร์หางเวลาลงจอดแล้ว ยังใช้ start การทำงานของมอเตอร์หางเวลาเริ่มบินขึ้นด้วยครับ เพราะปกติเวลาจะเริ่มบินจะต้องโยกสติ๊กซ้ายลงต่ำสุดและผลักไปซ้ายสุดพร้อมกับปรับทริมไปซ้ายสุด เพื่อให้ ESC ของมอเตอร์หางเริ่มทำงาน ซึ่งก็มีขั้นตอนพอสมควร แต่เมื่อติดสวิตช์ตัวนี้แล้ว ก็สามารถ start มอเตอร์หางได้ง่าย ๆ ด้วยการโยกสวิตช์ไปที่ off แล้วโยกกลับมาที่ on อีกครั้ง มอเตอร์หางจะทำงานทันทีครับ พอเล่นเสร็จเวลาลงจอดแล้วก็โยกสวิตช์ไปที่ off เพื่อตัดการทำงานของมอเตอร์หาง ทำให้สามารถเล่นได้สะดวกและปลอดภัยมากขึ้นครับ

ตอนนี้ Futaba Skysport 5-Heli ของผมก็มีปุ่มใช้งานเพิ่มอีกปุ่มแล้วครับ คราวต่อไปคงจะเพิ่มปุ่ม PLT เพื่อปรับการทำงานของ pitch อย่างละเอียดโดยต้องมีวงจรที่ใช้ norton-opamp เบอร์ LM3900N เป็นตัวช่วยครับ
ขอให้สนุกครับ
[email protected]1 ธันวาคม 2549
ออกแบบวงจร Idle Up Mixer และ Throttle Hold ด้วย LM3900N
Skysport5-Heli ของผม ใช้การเชื่อมสัญญาณระหว่างช่องคันเร่งและช่อง Pitch แบบง่าย ๆ ด้วยสวิตช์ Normal และ 3D เพื่อใช้ในการเล่น เฮลิคอปเตอร์ ซึ่งหากโยกสวิตช์ไปที่ 3D จะแยกช่องควบคุม pitch กับคันเร่งเด็ดขาด ซึ่งสามารถเล่น 3D ได้ แต่ยังไม่ค่อยเนียนเพราะคันเร่งจะคงที่ตลอดเวลา ไม่ได้สัมพันธ์กับ pitch ผมจึงออกแบบวงจรเลียนแบบสวิตช์ Idle Up โดยใช้ไอซีออปแอมป์เบอร์ LM3900N เพื่อจะสามารถปรับตั้ง Throttle curve ให้สัมพันธ์กับ pitch ตามที่ต้องการได้ แม้จะไม่ละเอียดเหมือน computer radio ในปัจจุบัน แต่ก็มีความสามารถใกล้เคียง Idle Up ของ analog radio แบบ Futaba Skysport 6-VH ทำให้สามารถเล่น ฮ 3D ได้สนุกขึ้น
กระบวนการทำงาน
เมื่อเราโยกสติ๊กคันเร่งขึ้นสูงสุด และลงต่ำสุด จะมีแรงดันไฟป้อนเข้าไปยังช่องสัญญาณควบคุม throttle อยู่ในช่วง 0-5 V. โดย 0V. เป็นการเร่งสูงสุด และ 5 V. เป็นการดับเครื่อง ส่วนช่วงสติ๊กกลาง ๆ จะประมาณ 2.5 V. ซึ่งเมื่อเราเล่น ฮ สติ๊กคันเร่งนี้ก็จะส่งสัญญาณไปยังช่องสัญญาณควบคุม pitch อีกช่องหนึ่งด้วย เพื่อให้ คันเร่งและ pitch สัมพันธ์กันโดยตลอดตั้งแต่คันเร่งต่ำสุดยันสูงสุด แต่เมื่อเราต้องการเล่นแบบ 3D เวลาเราลดคันเร่งลงถึงประมาณ กลาง ๆ หรือจุด hover และตีลังกา เราต้องการลดสติ๊กลงอีกเพื่อให้ pitch เป็นลบ แต่ไม่ต้องการให้คันเร่งลดลงตามไปด้วย เพื่อจะรักษารอบหมุนของใบพัดหลักเอาไว้สร้างแรงยกตัว จึงต้องมีวงจรควบคุมคันเร่งแยกออกต่างหากเพื่อรักษาคันเร่งให้สูงเอาไว้ วงจรนี้คือ Idle Up Mixer นี่เองครับ
หลักการก็คือใช้ไอซี นอร์ตันออพแอมป์ เบอร์ LM3900N ซึ่งเป็น Quad op-amps เปรียบเทียบความต่างของกระแส มาต่อวงจร unity gain คือไม่มีการขยายสัญญาณ และต่อ VR1 ปรับลดกระแสเข้าทาง non-inverting input เพื่อควบคุมกระแสไหลเข้า มากหรือน้อย หากปรับให้กระแสไหลมากที่สุด Throttle Curve ก็จะลาดชันเต็มที่ โดยแรงดันจะอยู่ในช่วง 0-5V. คือเมื่อลดสติ๊กลงสุด ก็จะเป็นการดับเครื่องเหมือนปกติ แต่หากปรับ VR1 ให้กระแสไหลน้อยลง Throttle Curve ก็จะลาดชันน้อยลงตามลำดับ โดยแรงดันจะอยู่ในช่วง 0-2.5v. คือแม้จะลดสติ๊กลงเลยช่วงกึ่งกลางถึงต่ำสุด แต่คันเร่งก็ลดลงอย่างมากที่สุดเพียง 50 เปอร์เซ็นต์ โดยในช่วงสติ๊กกลาง ๆ คันเร่งจะอยู่ประมาณ 70-80 เปอร์เซ็นต์ ทำให้สามารถรักษารอบใบพัดเวลาเล่น 3D ได้
การควบคุมใช้สวิตช์ Idle Up เพียงตัวเดียว โดยโยกสวิตช์ไปที่ Normal การควบคุม คันเร่งและ pitch จะสัมพันธ์กันแบบ 100 เปอร์เซ็นต์ แต่หากโยกไปที่ Idle Up การควบคุม pitch เป็น 100 เปอร์เซ็นต์ แต่การควบคุมคันเร่ง จะสัมพันธ์กับ pitch ในช่วง 50-100 เปอร์เซ็นต์ ตามการปรับตั้ง VR1
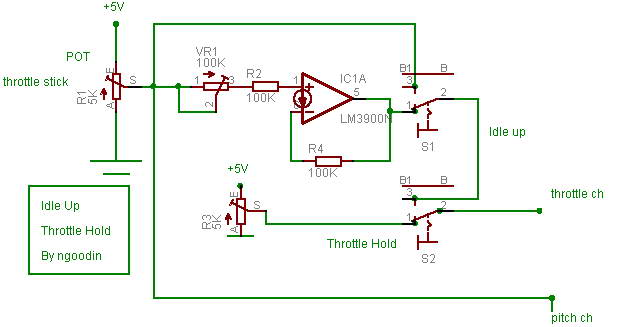
สำหรับไฟเลี้ยง ออปแอมป์ ก็ใช้ไฟ 12 V. จากแบตเตอรี่ของรีโมท ส่วนสวิตช์ Idle Up ผมก็ใช้สวิตช์ 3D เดิมนั่นเองติดตั้งด้านหน้ารีโมท สำหรับ VR1 ที่ใช้ปรับ Throttle Curve นั้น จะใช้ POT ติดตั้งภายนอกก็ได้ แต่ผมใช้ VR ตัวเล็ก ๆ ติดตั้งภายในรีโมท เพราะปรับตั้งตามที่ต้องการแค่ครั้งเดียว
สำหรับสวิตช์ Throttle Hold นั้น ใช้สำหรับคงที่ค่าคันเร่งไว้ตามที่กำหนด ซึ่งมีประโยชน์ในการฝึก Auto rotation ซึ่งสำหรับเฮลิคอปเตอร์ไฟฟ้านั้น ส่วนใหญ่จะตั้งค่า Throttle Hold ไว้ที่ค่าต่ำสุดเพื่อปิดการทำงานของมอเตอร์ ซึ่งมีประโยชน์สำหรับการฝึก Auto Rotation หรือเพื่อความปลอดภัยเวลาฝึกบิน 3D โดยใช้ Idle up ซึ่งหากมีข้อผิดพลาดแก้ไขไม่ทัน ก็สามารถสับสวิตช์ Throttle Hold เพื่อตัดการทำงานของมอเตอร์ได้ทันที แล้วพยายาม Auto Rotation ลงมาให้ปลอดภัย หรือหากเครื่องตกก็จะไม่เกิดความเสียหายมากนัก
การต่อสวิตช์ Throttle Hold นี้ จะต้องต่อไว้ถัดจาก Idle Up โดยใช้สวิตช์ 1 ตัวประกอบกับ VR5k ซึ่งจะเป็นตัวปรับตั้งว่าจะให้คันเร่งค้างอยู่ที่ใด ซึ่งสามารถกำหนดได้ตั้งแต่ 0-100 เปอร์เซ็นต์
ไอซี LM3900N นี้มีออปแอมป์ภายในอยู่ 4 ชุด นำมาใช้เป็น Idle up แล้ว 1 ชุด ยังเหลืออีก 4 ชุด ซึ่งผมจะนำไปทำ Pitch curve, Revo Mix ฯลฯ เพื่อให้มีฟังก์ชั่นใกล้เคียงวิทยุมาตรฐานสำหรับ ฮ ต่อไปครับ
ขอให้สนุกครับ
[email protected]28 ธันวาคม 2549