Autonomous Agents, Chalmers Tekniska Högskola
By: Mahiar Hamedi, Anders Ryberg, Markus Erlandsson
The bombhider
Introduction
This repport describes an artificial "creature" made from LEGO bricks. The creatures were inspired by Valentino Braitenberg's book Vehicles (1984).
In Vehicles, Braitenberg describes a set of thought experiments in which increasingly complex vehicles are built from simple mechanical and electronic components.
Each of these imaginary vehicles in some way mimics intelligent behavior, and each one is given a name that corresponds to the behavior it imitates: ``Fear,'' ``Love,''
``Values,'' ``Logic,'' etc. Braitenberg uses these thought experiments to explore psychological ideas and the nature of intelligence. Progressing through the book, the
reader sees very intricate behaviors emerge from the interaction of simple component parts. In a sense, Braitenberg ``constructs'' intelligent behavior---a process he
calls ``synthetic psychology.''
Our work follows Braitenberg in spirit. However, instead of Braitenberg's imaginary motors and sensors, we have used a set of real components known as
Electronic Bricks---LEGO bricks with electronic circuits inside. These bricks can be connected together to form a wide variety of artificial ``creatures,'' much like
Braitenberg's vehicles. Of course, our creature does not reach the levels of complexity that Braitenberg's do. On the other hand, the creature exists in the real world:
people can actually interact with and play with them.
The Robot
The robot is build as a four wheel car containing one light sensor on the roof and two touch sensors infront of the car on the left and right side.
Our robot includes two combined primitive behaviours acting together. The first function is perform the move program if there is enough light else stop and the second function
which is the run program can be described as follows:
Drive straight forward until left or right sensor is pressed then back up a little bit and drive forward again (as long as there is enough light ofcourse due to function 1)
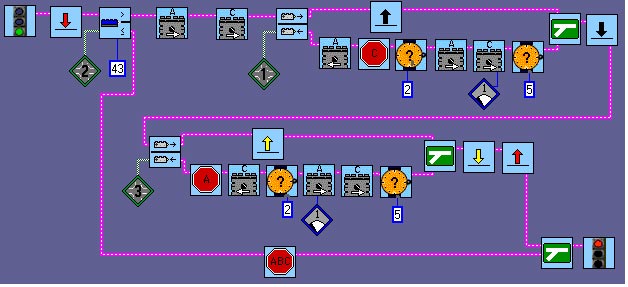
The robolab program for this procedure is as follows:
The program starts at the green light and then chooses between two options depending on the light. Path 1 if enough light, else path 2 which stops the robot.
Path 1 turns both tires on left and right side on in the same direction moving the robot forward. The the left sensor is checked and path 1 is chosen if sensor not pressed else path 2 is chosen where
the direction on the right tire is reversed making the robot back up in 2 seconds then the robot moves forward again. The right sensor is then checked and the procedure is again repeated this time with the reversed direction on the tire during the backup. The program then loops and starts at the green light again checking the light and so on.
Result
The two simple function acting on the robot lead to a quite complex behaviour where the robot finds its war under chairs, tables etc were it can find a dark place and then stops there to hide.
![]()