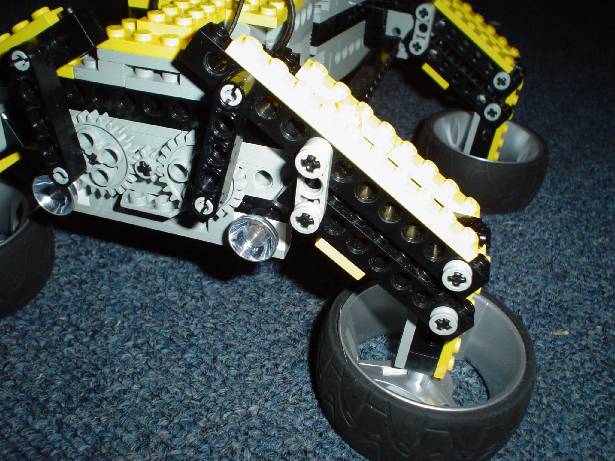
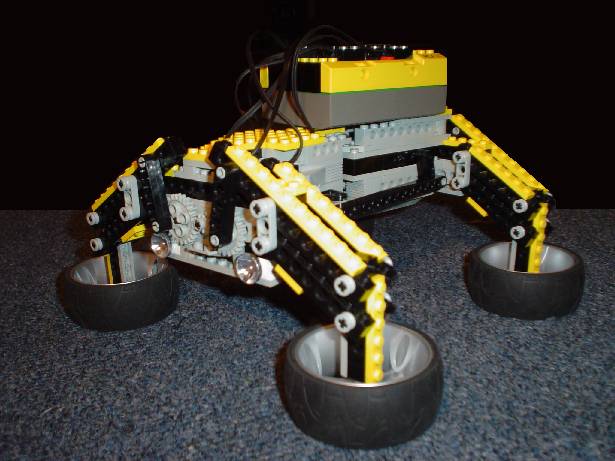
| This simple quadraped is the first fully successful walking robot built of my own design. Unlike the Quadraped 1A, this robot uses an articulating body or frame to accomplish the for/aft movement of the legs. The legs are run off of crankshafts on the front and rear of the unit that provide lift. These cranks must be perfectly timed on each leg to correspond with each other, so that the appropriate legs lift at the correct time. A pair of touch sensors on each end know when the leg on either side is in the up position. One motor controls the lift movement while another motor controls the for/aft movement through a series of gears on the pivot point. The program in the RCX directs the appropriate motors to move at exact moments determined by the touch sensor pair and a rotation sensor on the pivot motor. Basically the lift motor is run (forward). When one touch sensor is activated due to a leg lifted, the program stops the lift motor until the pivot motor turns a specified number of turns to the full left or right position. Which touch sensor is currently activated determines which way the pivot motor goes to make it walk forward or backward. The program structure is setup so that sending message 2 to the RCX (either from the computer or the LEGO remote) causes the pivot motor to return to its center position and stop; and the lift motor to run continuously. This creates a "dancing in place" type of effect where the robot is in motion but no forward or reverse distance is gained. From this point pressing 1 starts the pivot motor into the forward cycle or pressing 3 starts the pivot motor into the reverse cycle. This system proves rather reliable, but after several starts and stops the pivot motor loses its centering capability which provides a lock-up when it tries to go to its full pivot position but the rotation sensor doesn't read correctly. More gear reduction on the pivot motor or slight programming modification would probably prevent this alltogether. This robot walks relatively fast for it's type I believe and doesn't seem stressed to lift it's weight. |