Sweeping is a well known technique in 3D shape modeling. The central
problem in this technique is to define a moving coordinate frame at each
point of a trajectory to specify the orientation
of the cross-section curve.
We present practical formulae for efficiently computing a moving
frame.
The idea is to consider the discrete version of the problem,
i.e. computing a moving frame on a polygonal curve approximating the
sweeping trajectory.
This approach is based on the observation that the axial curve is
always approximated by a polygonal line in any polygon-based rendering
procedure of sweep surfaces.
Five discrete moving frames are proposed and compared.
The qualities of these discretized frames are in the following
increasing order:
Note: The error is measured from the rotation minimizing
frame computed using the differential equation by F.Klok where n =
no. of segments used.
Advantages of using Decrete Frames for Sweep Surface Modeling
Take advantage of rendering process
Make use of coherence between moving frames
Simplification of formula for Frenet frame and rotation minimizing frame
Robust and efficient calculation of moving frame
Formula depends only on the first derivative of axial curve but not
higher derivatives
The frame is defined everywhere along the curve
The formula is valid even in the degenerate case of a straight line
Experiments
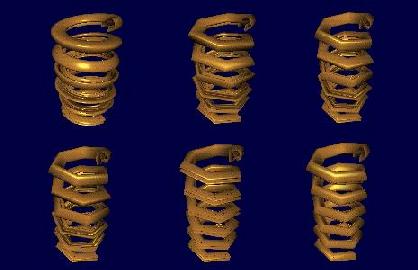
Helix
Results (Twisting from the rotation minimizing frame) :
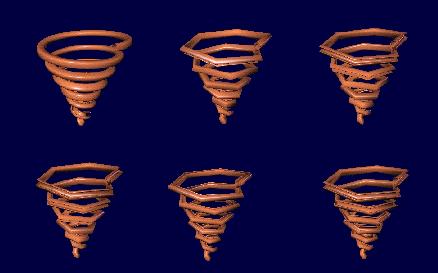
Spiral
Results (Twisting from the rotation minimizing frame) :
B-Spline
Results (Twisting from the rotation minimizing frame) :